I remember that @joergs5 was working on a robot kinematic K13. Is it available in the 3.5beta version?
Posts made by Ghazi
-
RE: Pre-release 3.5 beta 2 now availableposted in Beta Firmware
-
RE: Voron 2.4 Homing for XYZ Helpposted in General Discussion
@Karim if you move x or y before homing z, it would not work correctly
just switch line 5 and 6 to be like this,; homez.g ; called to home the Z axis ; ; generated by RepRapFirmware Configuration Tool v3.3.13 on Fri Oct 14 2022 18:23:21 GMT-0400 (Eastern Daylight Time) G1 X115 Y0 ; align the extruder to be above the z endstop G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 Z-355 F1800 ; move Z down until the endstop is triggered G1 Z5 F100 ; lift Z relative to current position G92 Z0 ; set Z position to axis minimum (you may want to adjust this) -
RE: Voron 2.4 Homing for XYZ Helpposted in General Discussion
@Karim IF you are using a switch endstop for z, first align the extruder to be above the z endstop. I use a G1 command then the position in X and Y before switch to relative position. The position of my z endstop is (X=230,Y=0)
; homez.g G1 X230 Y0 ; align the extruder to be above the z endstop G91 ; relative positioning -
RE: Voron 2.4 Homing for XYZ Helpposted in General Discussion
@Karim My configuration might look different. The first config file in this post looks fine, but after switching A and B motors in the motor mapping M584 X1 Y0 Z5:6:7:8 E3. I attached a simple image for the x and y axes and where the original is on the printing bed (0,0) in the configuration
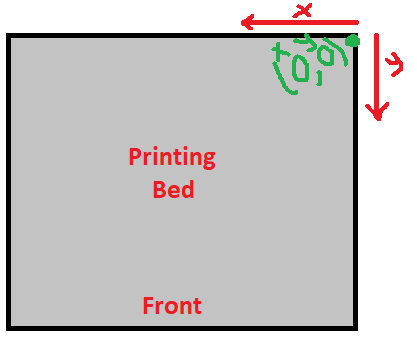
The point in green would be (350,350 ,0) after homing if you keep your current homing files. -
RE: Voron 2.4 Homing for XYZ Helpposted in General Discussion
@Karim X & Y end stops M574 define high-end M574 X2, M574 Y2 switch them to low-end M574 X1 S1 p"xstop" & M574 Y1S1 P"ystop". The homing files should move in the negative values -355. Also, did you fix the mixed in wiring A & B motors
-
RE: Voron 2.4 Homing for XYZ Helpposted in General Discussion
@Karim I donot have the printer nearby. I can help if you share the homing files you are testing right now
-
RE: Voron 2.4 Homing for XYZ Helpposted in General Discussion
@Karim Try the old homing file and see if it works. I changed nothing for homing x and y. But for Z I added few lines to move the toolhead above the z endstop
-
RE: Expansion 3HC not recognize (status led off)posted in Duet Hardware and wiring
@dc42 I returned it, and got a new one, works with no issue
-
RE: Voron 2.4 Homing for XYZ Helpposted in General Discussion
@Karim I checked my config file. B motor is X and A motor is Y. Check manual page 235
-
RE: Voron 2.4 Homing for XYZ Helpposted in General Discussion
@Karim This seems similar to my printer voron 2.4 It would be easier for you to debug if you write pin number instead of xstop, ystop. The reason is to make sure x and y motors are not flipped, which happened to me
-
Expansion 3HC not recognize (status led off)posted in Duet Hardware and wiring
I tried two different CAN cables and the expansion board was not recognized. The last cable used is this https://a.co/d/e9mazT3
The main board Duet3D 6HC has the latest firmware RRF 3.4.2 I tried to send M115 B1 but it returned
Error: M115: Response timeout: CAN addr 1, req type 6024, RID=13
The expansion's status led was never on. The only led light I see are the 4 lights for the power. Is there a way to connect it? or is it a defective expansion? an am I missing something? -
RE: CoreXY with rotating bedposted in Tuning and tweaking
@joergs5 My guess is that the next update RRF 3.5 will take awhile. Is there a way to modify the matrix of the CoreXY for the table mode? I read the paper cited in the doc "Transformation of CAM Data for 5-Axis CNC Machine Spinner U5-620", and the only difference is the equation (7) T^t_0 = CoreXY instead of Cartesian matrix. However, I see the given example of a modified CoreXY kinematics in the doc does not have any change in printing bed orientation nor X, Y, or Z offset distance.
-
RE: CoreXY with rotating bedposted in Tuning and tweaking
@joergs5 Adding that would make thing easier and would appreciate. @T3P3Tony mentioned you have a fork of RRF but I cannot find it
-
RE: CoreXY with rotating bedposted in Tuning and tweaking
@t3p3tony my slicing code is going to produce only gcode file. One solution I thought about is coordinate rotation G68 for rotational axes, but then I have to figure out how to run multiple motors at the same time. This morning, I thought all that can be resolved if I switch to relative coordinates instead of global
-
RE: CoreXY with rotating bedposted in Tuning and tweaking
@o_lampe It is my first time using duet board and I will try adding my own matrix for all axes
-
CoreXY with rotating bedposted in Tuning and tweaking
I'm trying to understand the command M669 and how to set the correct kinematic.
I'm working on adding two rotational axes to a fixed printing bed in a coreXY printer, which is similar to a robot 5-axis cnc in table mode
https://docs.duet3d.com/en/User_manual/Machine_configuration/robot_5_axis_CNC#bc-tabletable-example
but X and Y axes are coreXY instead of Cartesian axes. I'm not sure if there is a way to implement a coreXY to any defined two axes.
Also, is there any clarification about the M669 command used in the above link? is it M669 K13 or something else?