My problem was two fold. One is my io6.out pin doesn't work according to my scope and switching to a different pin fixed things. The other is I'm using 3.2.2 when the R argument for M563 is only available in RRF >= 3.3beta2. Same Problem with using the R argument is M950, only available in RRF >=3.3beta2.
Best posts made by flclkrazy
-
RE: Help configuring rc servo for spindleposted in CNC
Latest posts made by flclkrazy
-
Input Shaping Data Consistencyposted in Tuning and tweaking
I just got Input Shaping up and running and did some tests only along the x-axis. Three runs back to back with no shaping and these are the results:
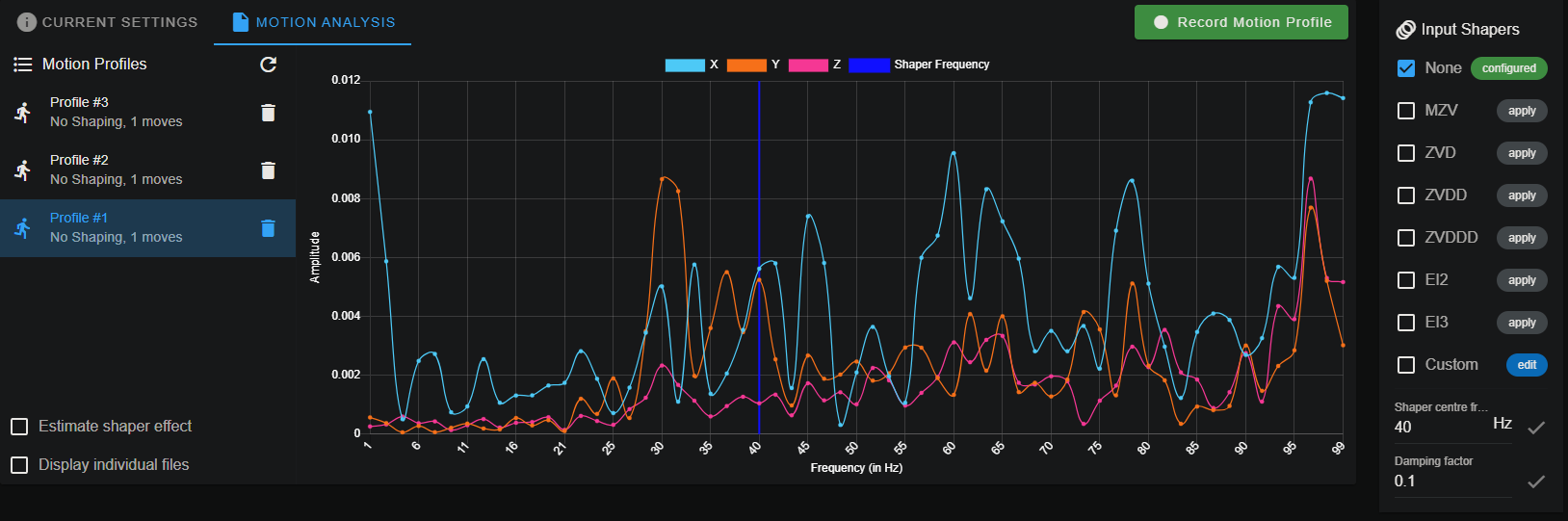
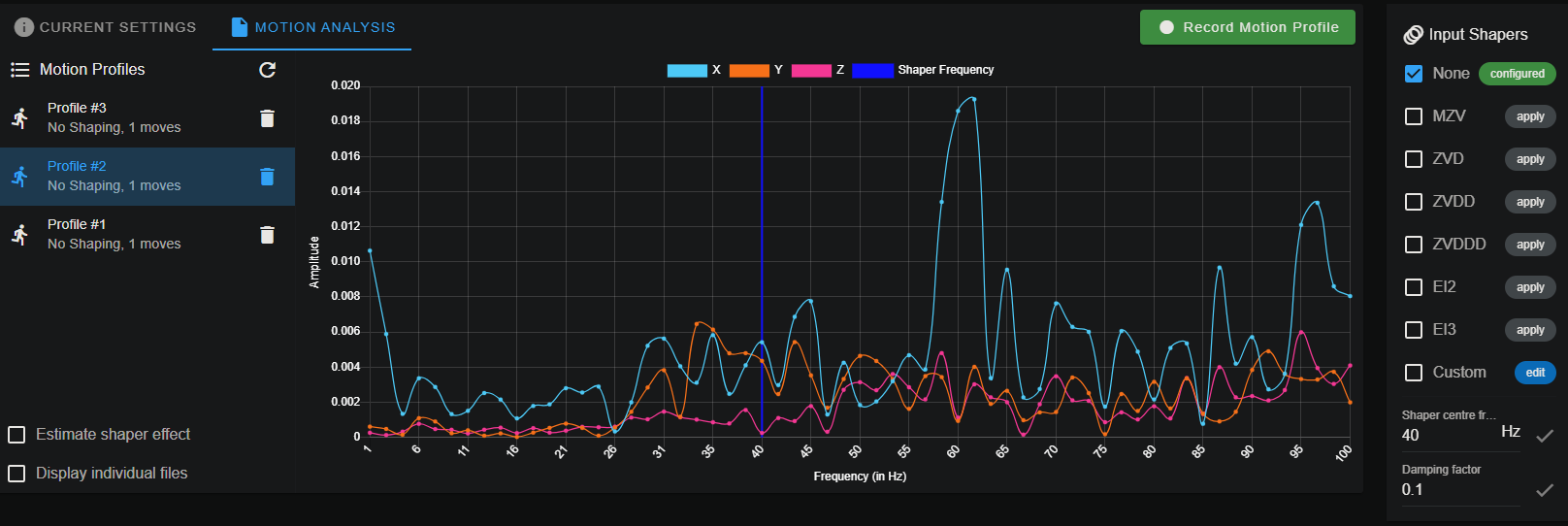
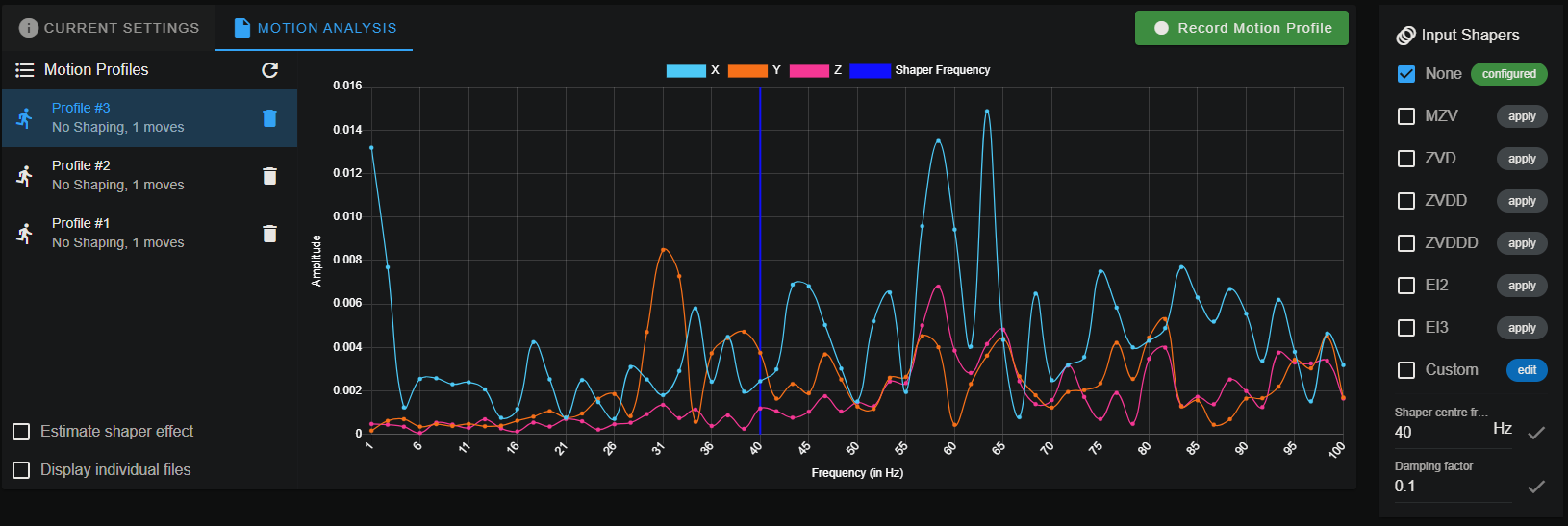
I would have thought the runs would be more consistent....
Does this look reasonable? Asking as a sanity check
-
RE: Help configuring rc servo for spindleposted in CNC
My problem was two fold. One is my io6.out pin doesn't work according to my scope and switching to a different pin fixed things. The other is I'm using 3.2.2 when the R argument for M563 is only available in RRF >= 3.3beta2. Same Problem with using the R argument is M950, only available in RRF >=3.3beta2.
-
RE: Help configuring rc servo for spindleposted in CNC
So what you're saying is that M563 does not map R0 to P1 the way I thought it did. So does that mean R0 and P0 are also the same?
;M950 P0 C"io3.out" ;Assign P0 to control enable relay using "io3.out" ;M950 R0 C"io6.out" L10000 Q50 ;Create spindle index 0, with PWM pin on io6 and 10000 RPM achieved at full PWM with a 50Hz PWM ;M563 P1 S"Spindle 1" R0 ; Create tool 1 with spindle 0 and call it "Spindle 1" M950 P1 C"io6.out" Q50I commented out the lines and tried that single M950 to see if I can get the servo to move, but M280 P1 S(degrees) does nothing.
Also of note, I am using FW 3.2.2 and here is my config.g
-
Help configuring rc servo for spindleposted in CNC
I have a Duet 3 that I'm trying to configure as a cnc router. I have io3.out going to a relay to turn the router on and off. I also have io6.out to control a rc servo that turns the speed potentiometer of the router.
What would be the best way to configure this setup?
So far the code below works for the relay, but I can't figure out how to make the servo move. I've tried M280 P1 S0, M280 P1 S90, and M280 P1 S180 but no movement.
M950 P0 C"io3.out" ;Assign P0 to control enable relay using "io3.out" M950 R0 C"io6.out" L10000 Q50 ;Create spindle index 0, with PWM pin on io3 and 10000 RPM achieved at full PWM with a 50Hz PWM M563 P1 S"Spindle 1" R0 ; Create tool 1 with spindle 0 and call it "Spindle 1"