@Threepwood Thanks for the replies, heading out, but I will check what you suggested tomorrow. I did watch the video and at least I know what it is called now.
Posts made by cdsmith12
-
RE: Is this Ringing or something elseposted in Tuning and tweaking
-
RE: Is this Ringing or something elseposted in Tuning and tweaking
I did run PID on the extruder and the bed after reassembly a couple days ago. I have linear rails on all axis, used an alignment tool and put a screw in every hole on the rails. Can rails bend too, that's one of the reasons I got rid of rods because I had a bent one.
-
RE: Is this Ringing or something elseposted in Tuning and tweaking
@Threepwood Kinematic setup with 3 linear rails and 3 threaded rods. Basically a modified V-Core. Just installed a new tooling plate bed from ratrig with a Keenovo 1000w heater, set at 65, stays about 62-64 degrees on surface.
-
Is this Ringing or something elseposted in Tuning and tweaking
I am finally dialing in my CoreXY and have an issue. I have had ringing on my Anet A8 before, but this looks different to me. It is printing really well but has this consistent pattern inside and out. I don't know if it's the printer or the slicing. I'll post more info if needed, but figured the visual might be enough.
Thanks
David


-
RE: Kinematics issueposted in Duet Hardware and wiring
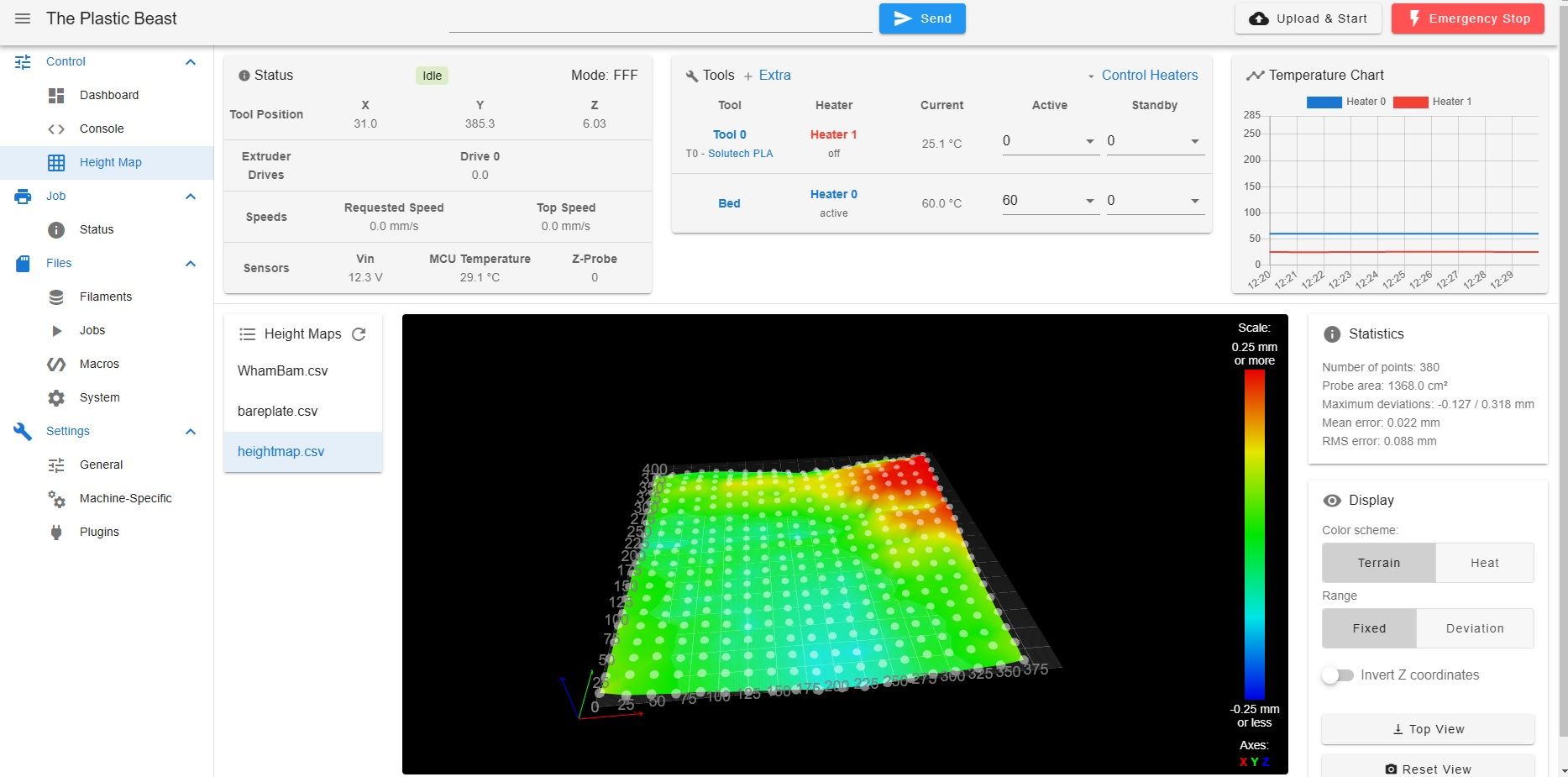
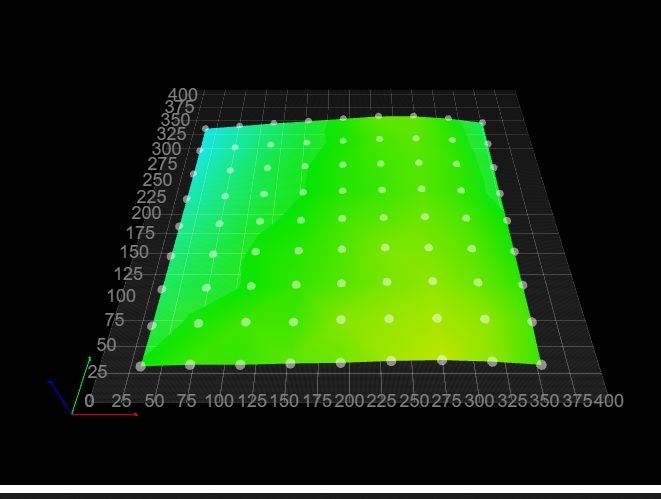
@deckingman appreciate everyone's input. I have not printed yet, but here is the heightmap with the new ratrig brand tooling plate. I did check to make sure everything was still square, but I didn't do anything but take the old 6061 bed off and put the new one on. My guess is either it wasn't truly 6061 when I bought it, or it was warping during print, or both. Will print something later and post an update.
-
RE: Kinematics issueposted in Duet Hardware and wiring
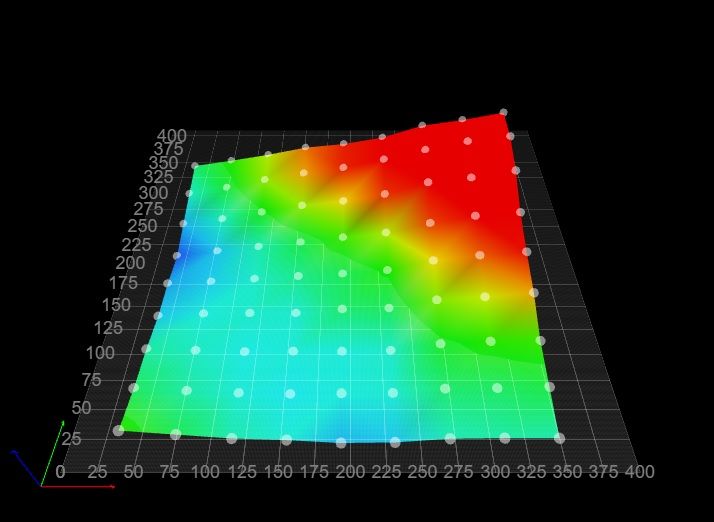
@deckingman @dc42 Thanks for both of your input. When I rebuilt my printer and went to kinematics back in January, I took the entire frame apart. When I put it back together, I used metal corner and frame brackets for everything, and eliminated all my printed connectors. There's like 60 or so brackets, and it is completely square and level, took me a couple days to loosen one place tighten another, but short of being welded, it can get much better.
The corner that is high is the edge with the single pivot point. When I put a straight edge across, you can see about 1mm gap, and I think that all the negative numbers are what's causing the biggest issue. I tried building it up with tape to the point the magnetic bed almost wouldn't stick on one side. It looked better, but I felt like if it was that warped, i should just get a good new quality plate.

-
RE: Kinematics issueposted in Duet Hardware and wiring
@Phaedrux I've had a 7mm 6061 Aluminum bed from the beginning 5 years ago or so, and I know it's warped, but mesh compensation always worked ok. I'm thinking that it's been heated so many times that it is warping or flexing during printing.
I decided I'm going to at least eliminate a problem, and just ordered a new cast tooling plate from RatRig so I will get it installed and post an update soon.
Thanks to everyone for the suggestions. This forum never lets me down.
-
RE: Kinematics issueposted in Duet Hardware and wiring
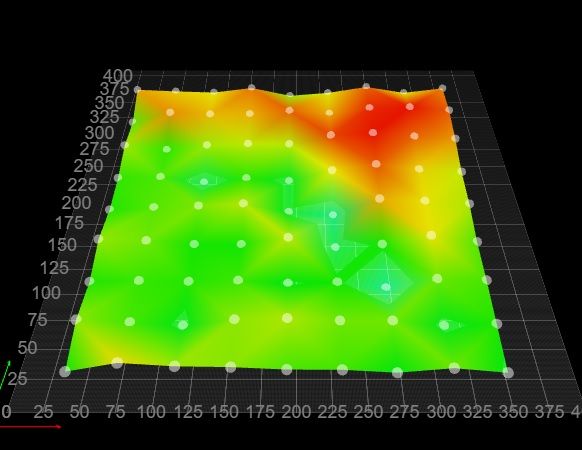
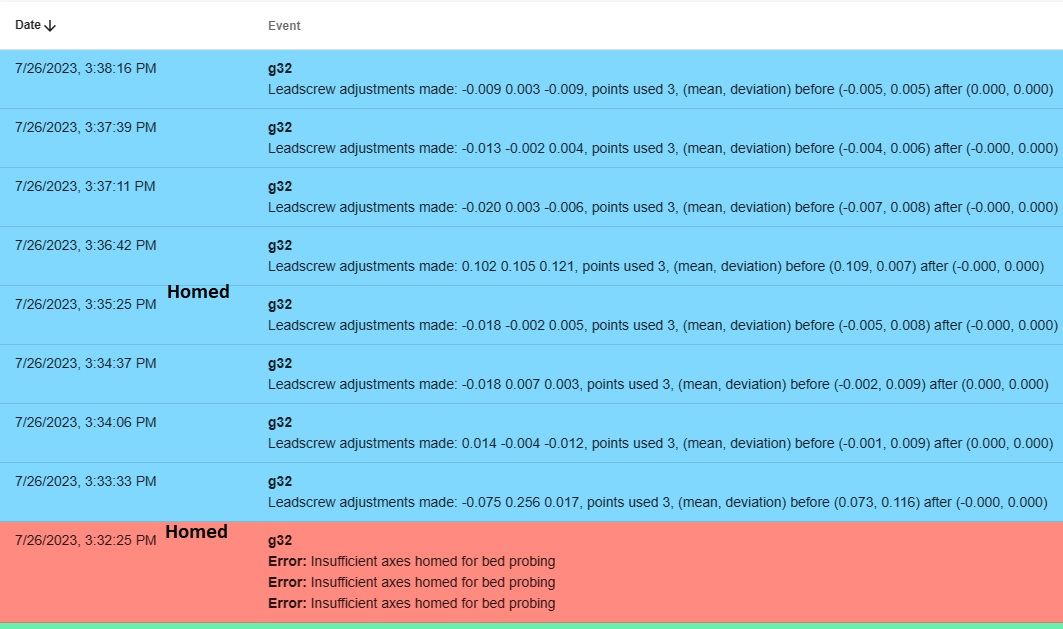
@Phaedrux I homed it and did 4 g32's and then homed it again and did 4 more. Before I homed it the first time, I had manually leveled it and got this height map.
-
Kinematics issueposted in Duet Hardware and wiring
I posted back in March when I switched to a Kinematics setup and had a lead screw issue that was my own mistake. Got that fixed and then spring hit, and I haven’t touched it since. Well, I broke my hand and all outside stuff came to a halt so I figured I would get this printer going again.
It’s a CoreXY with a Duet2, Duex5, BLTouch, and Hemera extruder. Print volume 410mm x 410mm x 440mm. My Z motors are front 2 corners and middle rear.
When I run the G32 command everything seems right, then I run G29 S0, and that seems fine although the height map shows high in the right rear, see picture. When I print, I have the G29 S1 command in my slicer and it says it’s loading the mesh in DWC, but it prints exactly like the height map without compensation. Nozzle too close at right rear, center prints perfect and left front doesn’t even stick because it’s too high. The opposite 2 corners print ok, but not perfect.
config.g
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"The Plastic Beast" ; set printer name
M669 K1 ; select CoreXY mode; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes backwards
M569 P1 S0 ; physical drive 1 goes backwards
M569 P2 S0 ; physical drive 2 goes backwards Z axis 1 front left
M569 P3 S1 ; physical drive 3 goes forwards
M569 P5 S0 ; physical drive 2 goes backwards Z axis 2 middle rear
M569 P6 S0 ; physical drive 2 goes backwards Z axis 3 front right
M584 X0 Y1 Z2:5:6 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X79.60 Y79.60 Z1600.00 E393.50 ; set steps per mm
M566 X1000.00 Y1000.00 Z100.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X24000.00 Y24000.00 Z300.00 E1200.00 ; set maximum speeds (mm/min)
M201 X3000.00 Y3000.00 Z100.00 E250.00 ; set accelerations (mm/s^2)
M906 X1000 Y1000 Z1000 E950 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X400 Y410 Z420 S0 ; set axis maxima; Endstops
M574 X1 S1 P"xstop" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin ystop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"duex.pwm1" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-26 Y1.7 Z1.094 ; set Z probe trigger value, offset and trigger heightM671 X-2:203:410 Y-4:409:-7 S1.0 ; leadscrews at front left, rear middle, and front right
M557 X33:375 Y31:371 S40 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B3950 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
T0 : select first toolbed.g
M561 ; clear any bed transform
G28 ;home
G30 P0 X33 Y29 Z-99999 ; probe near left front leadscrew
G30 P1 X203 Y374 Z-99999 ; probe near a rear middle leadscrew
G30 P2 X375 Y28 Z-99999 S3 ; probe near right front leadscrew and calibrate 3 motorshomeall.g
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-404 Y-415 F1800 ; move quickly to X or Y endstop and stop there (first pass)
G1 H1 X-404 ; home X axis
G1 H1 Y-415 ; home Y axis
G1 X5 Y5 F6000 ; go back a few mm
G1 H1 X-404 F360 ; move slowly to X axis endstop once more (second pass)
G1 H1 Y-415 ; then move slowly to Y axis endstop
G90 ; absolute positioning
G1 X229 Y206.3 F4000 ; go to center of bed
G30 ; home Z by probing the bed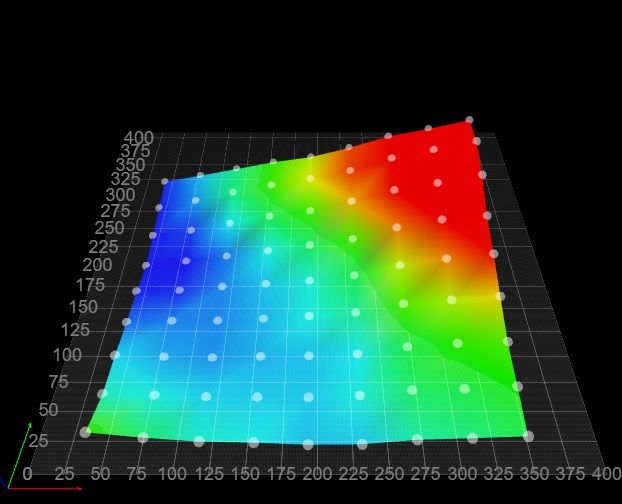
-
RE: 2 of my Triple Z motors moving twice as farposted in Duet Hardware and wiring
@deckingman Thank you and everyone for their input.
-
RE: 2 of my Triple Z motors moving twice as farposted in Duet Hardware and wiring
I take that back, about the coupler being the same. I had this thing all the way apart and all the pieces laying everywhere. I don't know how the heck I picked up the right coupler and leadscrew all those times and never had a mismatch until i just tried it.
-
RE: 2 of my Triple Z motors moving twice as farposted in Duet Hardware and wiring
That was it. I bought 2, then bought 2 more a couple years later. I thought they were the same since there wasn't any issues with the lead screw nuts. I'll order a new one with the right pitch
Thanks
-
RE: 2 of my Triple Z motors moving twice as farposted in Duet Hardware and wiring
@moth4017
yes all three stepper motors are the same -
2 of my Triple Z motors moving twice as farposted in Duet Hardware and wiring
So, I originally started with a Vulcanus 40, but changed it several times. Now I have kind of a combination of BLV and a Ratrig CoreXY. I was having some problems with my bed and decided to eliminate the 4 pieces of 2020 and 4mm aluminum plate (about 5 lbs.) from the original Vulcanus design and change from 2 leadscrews with 4 linear rails to a Triple motor kinematic style. I also added a Duex5
I used my old config file and edited it for 3 Z motors. Now my rear single motor is moving correctly, but the right and left front motors are moving exactly twice the distance. Their are probably other issues in my file, but I want to get the Z axis working first.
Any assistance is appreciated.
Config.g
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.1.3 on Sun Jun 14 2020 23:31:14 GMT-0500 (Central Daylight Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"The Plastic Beast" ; set printer name
M669 K1 ; select CoreXY mode; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes forwards
M569 P1 S0 ; physical drive 1 goes forwards
M569 P2 S0 ; Z front left physical drive 2 goes backwards
M569 P3 S1 ; physical drive 3 goes forwards
M569 P5 S0 ; Z front right physical drive 5 goes backwards
M569 P6 S0 ; Z middle rear physical drive 6 goes backwards
M584 X0 Y1 Z2:5:6 ; three Z motors connected to driver outputs 2, 5 and 6
M671 X-60:460:205 Y5:5:445 S0.5 ; leadscrews at front left, rear middle and front right
M350 Z16 E16 I0 ; configure microstepping without interpolation
M350 X16 Y16 I1 ; configure microstepping with interpolation
M92 X79.40 Y79.40 Z800.00 E399.40 ; set steps per mm
M566 X1000.00 Y1000.00 Z100.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X24000.00 Y24000.00 Z300.00 E1200.00 ; set maximum speeds (mm/min)
M201 X3000.00 Y3000.00 Z100.00 E250.00 ; set accelerations (mm/s^2)
M906 X1400 Y1400 Z1400 E950 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X399 Y410 Z400 S0 ; set axis maxima; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"duex.pwm1" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F100 T4000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-26 Y1.7 Z1.135 ; set Z probe trigger value, offset and trigger height
M557 X5:372 Y7:405 S20 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B3950 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S285 ; set temperature limit for heater 1 to 285C; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H1 T45 ; set fan 0 value. Thermostatic control is turned on
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M575 P1 S1 B57600 ; enable support for PanelDue
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
M912 P0 S1 ; set cpu temp offset
M501
T0 : select first toolbed.g
; bed.g
; called to perform automatic bed compensation via G32
;
; generated by RepRapFirmware Configuration Tool v3.1.3 on Sun Jun 14 2020 23:31:14 GMT-0500 (Central Daylight Time)
M561 ; clear any bed transform
G28 ; home
G30 P0 X370 Y5 Z-99999 ; probe near left front leadscrew
G30 P1 X30 Y5 Z-99999 ; probe near right front leadscrew
G30 P2 X205 Y380 Z-99999 S3 ; probe near a rear middle leadscrew and calibrate 3 motors -
RE: Been fighting with print adhesion and mesh bed compensation.posted in Tuning and tweaking
@cdsmith12 Sorry for the jumbled words, the preview didn't look like that.
-
RE: Been fighting with print adhesion and mesh bed compensation.posted in Tuning and tweaking
@wwak84 So I figured out that it was loading, but not in time to edit before you posted. Here is the top and bottom of a print I started. I think I got my z offset better, but something is causing this ripple effect and the higher it gets the more it drags, then ultimately knocks the print off. These were today with the height map posted above.

 This is the print before I made this post and it is 390mm long, if you look closely it knocked it loose at about 3mm thick and then continued to print, but it has this weird wavy look, but the side view of the layers looks pretty good.
This is the print before I made this post and it is 390mm long, if you look closely it knocked it loose at about 3mm thick and then continued to print, but it has this weird wavy look, but the side view of the layers looks pretty good. 

-
RE: Been fighting with print adhesion and mesh bed compensation.posted in Tuning and tweaking
Under the "Compensation in use" it says "none", so I guess I need to figure out where my code is wrong. I'm also going to adjust the one corner just a hair to try to get it all green, and rerun mesh compensation.
-
Been fighting with print adhesion and mesh bed compensation.posted in Tuning and tweaking
My printer prints really good, but I can’t get a print to stay on to save my life.
Many of you that have been around a while will remember the Vulcanus 40 COREXY, 440mm x 440mm x 400mm, this is what I built in the beginning. I got frustrated, pushed it to the side and left it for 3 years. Then when the Hemera came out a couple years ago I decided I was going to completely revamp it. I changed the electronics to a Duet 2 Wi-Fi, E3d Hemera, and BlTouch. I replaced all of the linear rods, with linear rails, and no I am not having any issues with the 4 vertical linear rails. If I take the 2 Z motor threaded rods out I can slide it up and down with no resistance. I put a WhamBam flex plate on my 8mm cast aluminum bed.
What I have noticed recently is that when it lays down the second layer I can hear it dragging across that first layer in certain places which leads me to think that it is not loading my Mesh compensation correctly. Also I have never enclosed it, but intend to do so soon.
I use Duet Web Control, Reprapfirmware, and PrusaSlicer
I have other printers, but I really want to get this large format printer that I have sunk a crap load of money into with 3 different sets of electronics, and 3 different extruders to work. Thanks for any assistance.
Prussa slicer Startup Gcode
M104 S[first_layer_temperature] ; set extruder temp
M140 S[first_layer_bed_temperature] ; set bed temp
M190 S[first_layer_bed_temperature] ; wait for bed temp
M109 S[first_layer_temperature] ; wait for extruder temp
G28 XY ;Home XY
M561 ; Clear any bed transform that might be in place
G1 X203 Y208 ; Move Probe to middle of bed
G30 ; Do a single probe
M375 P"WhamBam.csv" ; Load my custom heightmap. Otherwise use G29 S1
G1 Z20.0 F6000 ; Move Z to 10
G1 X5 Y5 ; Move head to front left
G92 E0.0 ; reset extruder position
G1 Z0.2
G1 X60.0 E9.0 F1000.0 ; intro line
G1 X100.0 E12.5 F1000.0 ; intro line
G92 E0.0 ; reset extruder positionConfig.g
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.1.3 on Sun Jun 14 2020 23:31:14 GMT-0500 (Central Daylight Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"The Plastic Beast" ; set printer name
M669 K1 ; select CoreXY mode; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes forwards
M569 P1 S0 ; physical drive 1 goes forwards
M569 P2 S0 ; physical drive 2 goes backwards
M569 P3 S1 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z810.00 E420.00 ; set steps per mm
M566 X1000.00 Y1000.00 Z100.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X24000.00 Y24000.00 Z300.00 E1200.00 ; set maximum speeds (mm/min)
M201 X3000.00 Y3000.00 Z100.00 E250.00 ; set accelerations (mm/s^2)
M906 X1400 Y1400 Z1400 E950 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X399 Y410 Z400 S0 ; set axis maxima; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F100 T4000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-26 Y1.7 Z0.96 ; set Z probe trigger value, offset and trigger height
M557 X5:365 Y30:390 S20 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B3950 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S285 ; set temperature limit for heater 1 to 285C; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H1 T45 ; set fan 0 value. Thermostatic control is turned on
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M575 P1 S1 B57600 ; enable support for PanelDue
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
M912 P0 S1 ; set cpu temp offset
M501; config-override.g file generated in response to M500 at 2023-02-09 21:29
; This is a system-generated file - do not edit
; Heater model parameters
M307 H0 R0.223 K0.166:0.000 D3.49 E1.35 S1.00 B0
M307 H1 R1.942 K0.534:0.000 D5.82 E1.00 S1.00 B0 V12.1
; Workplace coordinates
G10 L2 P1 X0.00 Y0.00 Z0.00
G10 L2 P2 X0.00 Y0.00 Z0.00
G10 L2 P3 X0.00 Y0.00 Z0.00
G10 L2 P4 X0.00 Y0.00 Z0.00
G10 L2 P5 X0.00 Y0.00 Z0.00
G10 L2 P6 X0.00 Y0.00 Z0.00
G10 L2 P7 X0.00 Y0.00 Z0.00
G10 L2 P8 X0.00 Y0.00 Z0.00
G10 L2 P9 X0.00 Y0.00 Z0.00; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.1.3 on Sun Jun 14 2020 23:31:14 GMT-0500 (Central Daylight Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-405 Y-405 F1800 ; move quickly to X or Y endstop and stop there (first pass)
G1 H1 X-405 ; home X axis
G1 H1 Y-405 ; home Y axis
G1 X5 Y5 F6000 ; go back a few mm
G1 H1 X-405 F360 ; move slowly to X axis endstop once more (second pass)
G1 H1 Y-405 ; then move slowly to Y axis endstop
G90 ; absolute positioning
G1 X31 Y5 F6000 ; go to first bed probe point and home Z
G30 ; home Z by probing the bed; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool v3.1.3 on Sun Jun 14 2020 23:31:14 GMT-0500 (Central Daylight Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G90 ; absolute positioning
G1 X41 Y15 F6000 ; go to first probe point
G30 ; home Z by probing the bed; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning