@dc42 Thanks. I think I may just use the existing duet rotating magnet filament monitor that I used with the previous extruder. This is located off the print head before the ptfe tube that feeds the extruder, it's simple to run the wire along with the power/can cable to the roto toolboard and I wouldn't have to worry about routing/securing the ffc cable near the filament feed. I don't think the integrated duet roto filament monitor offers any advantage over the original rotating magnet filament monitor, I don't have a use for the feature button.
Posts made by bug2k22
-
RE: Duet3D Roto Filament Monitor FFC Cable Length?posted in Duet Hardware and wiring
-
Duet3D Roto Filament Monitor FFC Cable Length?posted in Duet Hardware and wiring
I have a revo roto extruder with a roto toolboard but mounted slightly differently to how the documentation shows. I see that it says the maximum length of FFC cable from the duet3d roto filament monitor to the toolboard should be no longer than the supplied 30mm length. Is this a hard limit? I'm probably going to need something like 40-50mm or so, is this likely to be an issue?
Thanks.
-
RE: Folgertech FT5 Duet Upgradeposted in My Duet controlled machine
Yes, it's not the lightest, I did need to make up an extra adapter bracket to use the horizon strain gause z probe which added a little weight to the print head assembly. I see there are a few that have done corexy conversions on these printers. Besides slightly faster print speeds are there any other advantages to running corexy?
I did use one of the high flow 0.4 revo nozzles which seems to easily manage 20mm3/s+ with pla, extrusion speed isn't going to be the limiting factor on this.
-
Folgertech FT5 Duet Upgradeposted in My Duet controlled machine
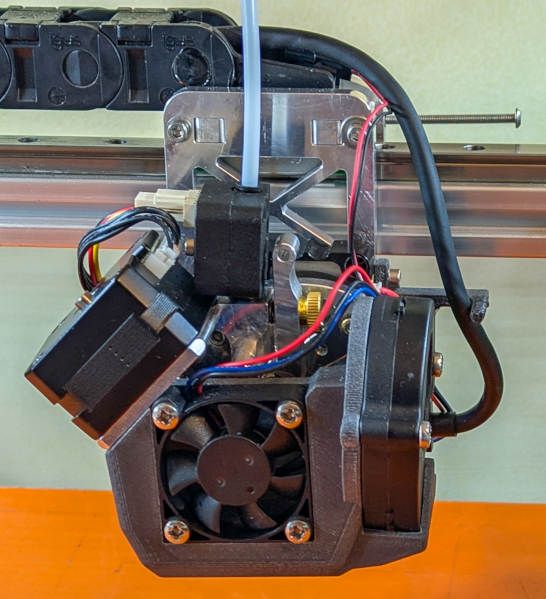
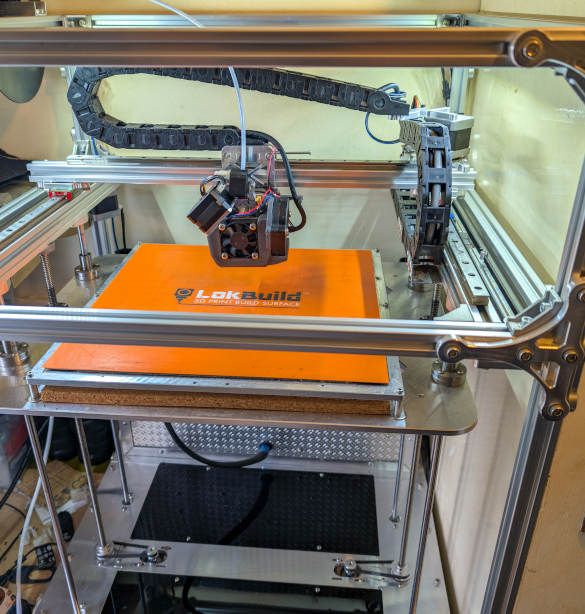
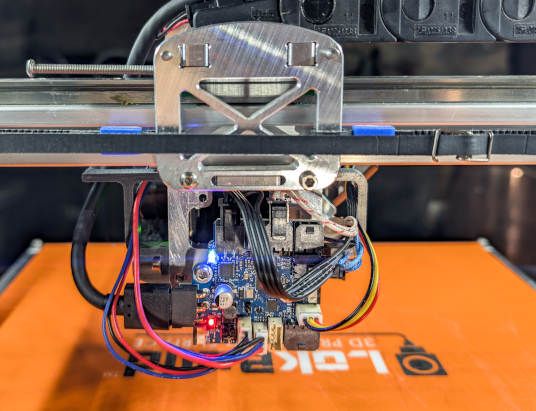
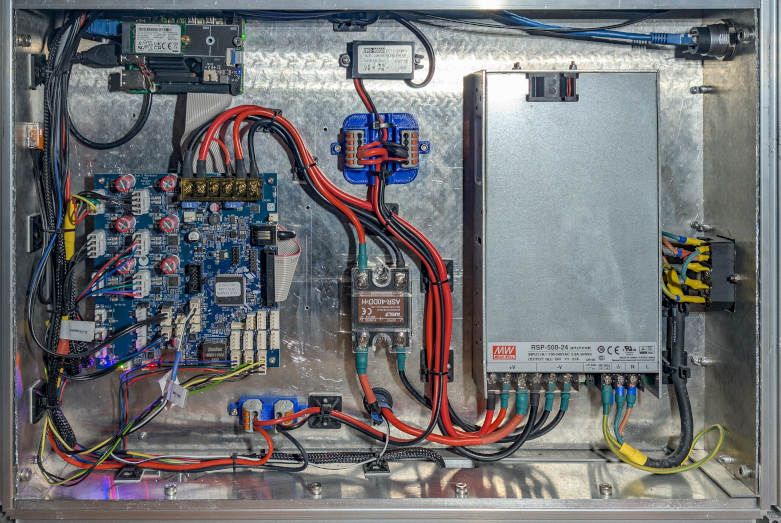
Picked up an old Folgertech FT5 a while ago. Finally got round to finishing the upgrade. Has many of the 713maker cnc upgraded mounts and brackets. Swapped out the old controller which was running Marlin with a Duet 6HC, Roto Toolboard, Microswiss NG extruder with a revo nozzle and a Dyze Design Horizon Z probe.
It's not a fast printer but print quality seems good, probably needs a little tuning to get the best out of it.

-
RE: What useful things have you printed on a 3D printer?posted in General Discussion
Many things, upgrade parts and mounts for bikes, timetrial starting clock, pool shot timer, electronic telescope focuser conversion, workshop storage bins/trays/holders, battery adapters, camera flash reflectors, speaker mounts and things I've long since forgotten about.
-
RE: Mesh bed compensation, poor first layer?posted in Tuning and tweaking
Just a brief follow up to this, I never could get a good first layer with this setup. I tried with a bltouch, inductive and IR sensors all gave similar results, the first layer was very inconsistent.
I have now installed a dyze designs horizon z probe which uses the nozzle for z probing, mesh bed compensation now works as expected and I get very good, consistent first layers. -
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@droftarts Thanks Ian, it's now working!
I didn't look at M906 as it seems to work with the extruder connected directly to the 6HC even with it early in the config. Something to remember for future installs.
-
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@jay_s_uk Thanks, that did complete the downgrade on all boards and the pi.
Duet 3 MB6HC MB6HC 3.5.4 Duet 3 Expansion TOOL1RR TOOL1RR 3.5.4 Duet Software Framework DSF 3.5.4 Duet Web Control DWC 3.5.4This has not changed the behaviour, still no movement on the extruder motor.
I have just double checked the cable from the toolboard to the motor and connectivity is fine on all pins. -
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@jay_s_uk The second M997 S2 command did flash up a notice saying it was upgrading, but nothing seems to have changed, restarting the board shows the 3.6.0-beta.2 firmware on all boards and the sbc packages are still on 3.6.0-beta.2.
If I ssh in to the pi, I see that the duet3d.list is now showing "deb https://pkg.duet3d.com/ stable-3.5 armv7" so it is on the stable channel but nothing downgrades. -
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@jay_s_uk Does that downgrade the boards and all sbc (pi5) packages too?
-
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@Phaedrux I haven't run this configuration with 3.5.4. With the previous setup, upgrading to 3.5.4 broke the setup and the board firmware became corrupt and had to recover with a usb cable. So I upgraded to the latest beta on the board and sbc and all has been working well.
I presume it's not a simple task to downgrade both boards and all the sbc packages to a previous version?
-
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@Phaedrux Entering that command to the console at the web interface produces no output.
07/01/2025, 22:13:36 M98 P"config.g" 07/01/2025, 22:12:21 M98 P"config.g" 07/01/2025, 20:53:30 Connection established -
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@jay_s_uk Just powered everything back on, set the hotend temperature and set to extrude 20mm from the paneldue interface. Nothing appears to happen.
M122 B20 Diagnostics for board 20: Duet TOOL1RR firmware version 3.6.0-beta.2 (2024-11-12 08:12:15) Bootloader ID: SAME5x bootloader version 2.9 (2023-10-06) All averaging filters OK Never used RAM 170600, free system stack 198 words Tasks: Move(3,nWait 7,0.0%,147) TMC(2,delaying,1.3%,31) HEAT(2,nWait 6,0.1%,114) CanAsync(5,nWait 4,0.0%,66) CanRecv(3,nWait 1,0.0%,73) CanClock(5,nWait 1,0.0%,64) ACCEL(3,nWait 6,0.0%,67) MAIN(1,running,96.5%,320) IDLE(0,ready,0.0%,29) AIN(2,nWait 2,2.1%,211), total 100.0% Owned mutexes: Last reset 00:03:32 ago, cause: power up Last software reset data not available Moves scheduled 1, hiccups 0 (0.00/0.00ms), segs 3, step errors 0 (types 0x0), maxLate 0 maxPrep 14, ebfmin 0.00 max 0.00 Peak sync jitter -4/4, peak Rx sync delay 181, resyncs 0/0, no timer interrupt scheduled, next step interrupt due in 4279184150 ticks, disabled VIN voltage: min 23.9, current 24.0, max 24.0 MCU temperature: min 21.4C, current 21.6C, max 21.8C Driver 0: pos 8000, 400.0 steps/mm, standstill, SG min 0, temp 20.1C, read errors 0, write errors 0, ifcnt 12, reads 28244, writes 1, timeouts 0, DMA errors 0 Last sensors broadcast 0x00000002 found 1 5 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 1194, send timeouts 0, received 521, lost 0, ignored 0, errs 0, boc 0, free buffers 38, min 38, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 285, adv 37080/37080 Accelerometer: LIS2DW, status: 00 Inductive sensor: raw value 268435455, frequency 25.00MHz, current setting 13, amplitude error Integrated filament monitor not present I2C bus errors 0, naks 0, contentions 0, other errors 0 === Filament sensors === Interrupt 5726621 to 0us, poll 2 to 172us Driver 0: no data received, errs: frame 0 parity 0 ovrun 0 pol 0 ovdue 0The board was purchased from E3D November 24
. -
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@jay_s_uk yes, tool selected and hotend up to temperature.
I made up a new cable and wired the extruder motor directly to the 6HC, changed the address from '20.0' to the 6hc output and it works.
-
RE: Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
@jay_s_uk said in Roto Toolboard, no extruder motor motion?:
M115 B20
Yes, the address is correct, the z probe and nozzle heater work.
M115 B20 Duet TOOL1RR firmware version 3.6.0-beta.2 (2024-11-12 08:12:15) -
Roto Toolboard, no extruder motor motion?posted in Duet Hardware and wiring
I'm unable to get the extruder motor to work when connected to the roto toolboard. I have connected it to an output on the 6HC and it works correctly.
The printer uses a 6HC (sbc mode) with a roto toolboard, micro swiss ng extruder with a revo heater/nozzle hotend and dyze design horizon for nozzle probing z height.
The extruder is connected to 'driver 0' on the toolboard, I have double checked the wiring A+ and B+ to the upper pins and A- and B- to the opposite lower pins. Checked the coil resistances to make sure I have the correct pairs wired.
Just updated the the latest firmware just in case.Duet 3 MB6HC MB6HC 3.6.0-beta.2 Duet 3 Expansion TOOL1RR TOOL1RR 3.6.0-beta.2 Duet Software Framework DSF 3.6.0-beta.2 Duet Web Control DWC 3.6.0-beta.2config.g
G90 ; absolute coordinates M83 ; relative extruder moves M550 P"folgertech5" ; set hostname G4 S2 ; wait for expansion boards to start M575 P1 B57600 S1 ; configure PanelDue support M569 P20.0 S1 ; driver 20.0 goes backwards (extruder 0) M569 P0.1 S1 ; driver 0.1 goes forwards (X axis) M569 P0.2 S0 ; driver 0.2 goes backwards (Y axis) M569 P0.3 S0 ; driver 0.3 goes backwards (Y axis) M569 P0.4 S1 ; driver 0.4 goes forwards (Z axis) M569 P0.5 S0 ; driver 0.5 goes backwards (Z axis) M906 X1400 Y1400 Z1200 E900 ; set motor driver currents M584 X0.1 Y0.2:0.3 Z0.5:0.4 ; set axis mapping M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M92 X80 Y80 Z3200 ; configure steps per mm M208 X0:248 Y0:270 Z-0.5:350 ; set minimum and maximum axis limits M566 X900 Y900 Z60 ; set maximum instantaneous speed changes (mm/min) M203 X12000 Y12000 Z1200 ; set maximum speeds (mm/min) M201 X2200 Y2200 Z900 ; set accelerations (mm/s^2) M556 S100 X-0.191 ; skew compensation obtained via califlower calibration M584 E20.0 ; set extruder mapping M350 E16 I1 ; configure microstepping with interpolation M92 E400 ; configure steps per mm M566 E600 ; set maximum instantaneous speed changes (mm/min) M203 E600 ; set maximum speeds (mm/min) M201 E1200 ; set accelerations (mm/s^2) M558 P8 C"!20.io1.in" H1 ; the z probe is used for bed probing G31 P500 X0 Y0 Z-0.25 M574 X2 P"!io1.in" S1 ; configure X axis endstop M574 Y2 P"!io2.in" S1 ; configure Y axis endstop M574 Z1 S2 ; z endstop M671 X-100:400 Y150:150 S5.0 ; position of leadscrew/bed pivot point at left and right of X axis M308 S0 P"temp0" Y"thermistor" A"Heated Bed" T100000 B4066 ; configure sensor #0 M308 S1 P"20.temp0" Y"thermistor" A"Nozzle" T100000 B4267 C7.06e-8 ; configure sensor #1 M950 H0 C"out0" T0 ; create heater #0 heated bed M143 H0 P0 T0 C0 S120 A0 ; configure heater monitor #0 for heater #0 M307 H0 R0.206 K0.163:0.000 D3.20 E1.35 S1.00 B0 ; configure model of heater #0 M950 H1 C"20.out0" T1 ; create heater #1 hotend heater M307 H1 R5.519 K0.447:0.587 D3.02 E1.35 S1.00 B0 V23.7 M143 H1 P0 T1 C0 S300 A0 ; configure heater monitor #0 for heater #1 M140 P0 H0 ; configure heated bed #0 M950 F0 C"out7" ; create fan #0 M106 P0 C"Part Cooling Fan" S0 L0 X1 B0.1 ; configure fan #0 M950 F1 C"20.out1" ; create fan #1 M106 P1 C"Hot End Fan" S0 B0.1 H1 T45 ; configure fan #1 M950 F3 C"out6" Q10000 ; configure out4 to control electronics enclosure fan M106 P3 C"Electronics Fan" S0 H-1 M950 F2 C"out9" Q25000 ; configure out9 to control led lighting M106 P2 C"Bed Lighting" S0 H-1 M563 P0 S"Print Head" D0 H1 F0 ; create tool #0 M568 P0 R0 S0 ; set initial tool #0 active and standby temperatures to 0C M591 D0 P3 C"20.io2.in" S1 R20:150 ; filament monitor ;M955 P0 C"spi.cs1+spi.cs0" I60 ; all wires connected to temp DB connector ;M593 P"zvddd" F36 S0.1 ; configure input shaping M557 X4:244 Y0:260 S20:20 ; define grid for mesh bed compensation, note: these are the probe positions not the nozzle G29 S2 ; disable mesh bed compensationI'm possibly missing something obvious, suggestions as to what I can test next?
-
RE: Revo heater core, incorrect temperature?posted in Duet Hardware and wiring
@dc42 Thanks, that seems to have fixed the issue, it now reads within 1 degree of what my infra red thermometer reads.
-
RE: Revo heater core, incorrect temperature?posted in Duet Hardware and wiring
@elmoret Thanks, yes provided that accuracy is better in the operating termperature range. I just had not seen such a lower temperature accuracy issue on the 3 other printers I built using duet boards, this is the first tool board I've used so perhaps it's related.
-
RE: Revo heater core, incorrect temperature?posted in Duet Hardware and wiring
@jay_s_uk I did check on the datasheet for the 104NT-4-R025H42G and this shows that the expected resistance at 10degC is 208.8Kohms which is about correct with what I measured. I purchased this from E3D.
-
RE: Revo heater core, incorrect temperature?posted in Duet Hardware and wiring
Thanks for that, the value does not significantly change the temperature displayed, maybe a degree or so. If I change the B value to something like 8000+ or so the ambient temperature displayed is closer to reality, but I would think that would mess with the scaling at higher temperatures.