I feel just having a Small Dot Next to the XYZ and Probe areas would be very helpful
to have a quick visualization of endstop status
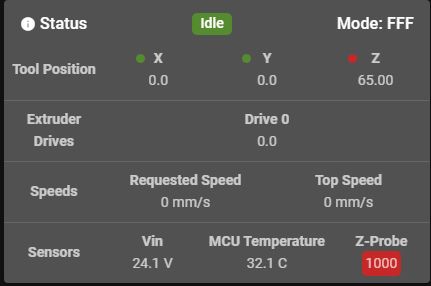 image url)
image url)
Best posts made by Adamfilip
-
RE: Cant find Endstop status on DWCposted in Duet Web Control wishlist
-
Fat Finger Compensationposted in Duet Web Control wishlist
When I using DWC on my iphone
when I pause a print job. the resume and cancel print job buttons are stacked on top of each other very close. I have big hands and its super easy to accidently press the cancel button instead of the resume button. can we add a decent amount of space between them to compensate for fat fingers please -
DWC UI Skins/Themesposted in Duet Web Control wishlist
I think it would be great if you could apply community created skins/themes to the DWC, that way everyone could share alternative UI's that might work better for their specific workflow.
If someone made a CNC layout or a Robot Layout, or just a Minimalist printer setup.
Being able to just upload into a Theme directory in system tab and switch between them like plugins.
reminds me of the old Winamp Skins days
")

-
RE: deployprobe.g for Euclid not runningposted in Tuning and tweaking
@adamfilip probably just a typo and should be F
-
RE: BtnCmd-DWC Plugin - Customise DWC - v01.03.08 01-03-25posted in Plugins for DWC and DSF
Is there someplace to download different configurations of entire layouts of panels and buttons.
or a way to load user created custom panels themselves.would be great if we could share various configurations to get us 90% of the way there.
-
RE: Order Files by Date UPLOADED!posted in Duet Web Control wishlist
@airscapes mine sort by Data modified, which is usually the upload date..
cant you just click on date modified and have it sort them that way? -
RE: Wiring LIS3DH Accelerometer to Duet2Wifiposted in Duet Hardware and wiring
@adamfilip no i had two wires mixed up.. Swap the SC3 and Sc4
this is the updated drawing and it was detected by Duet2Wifi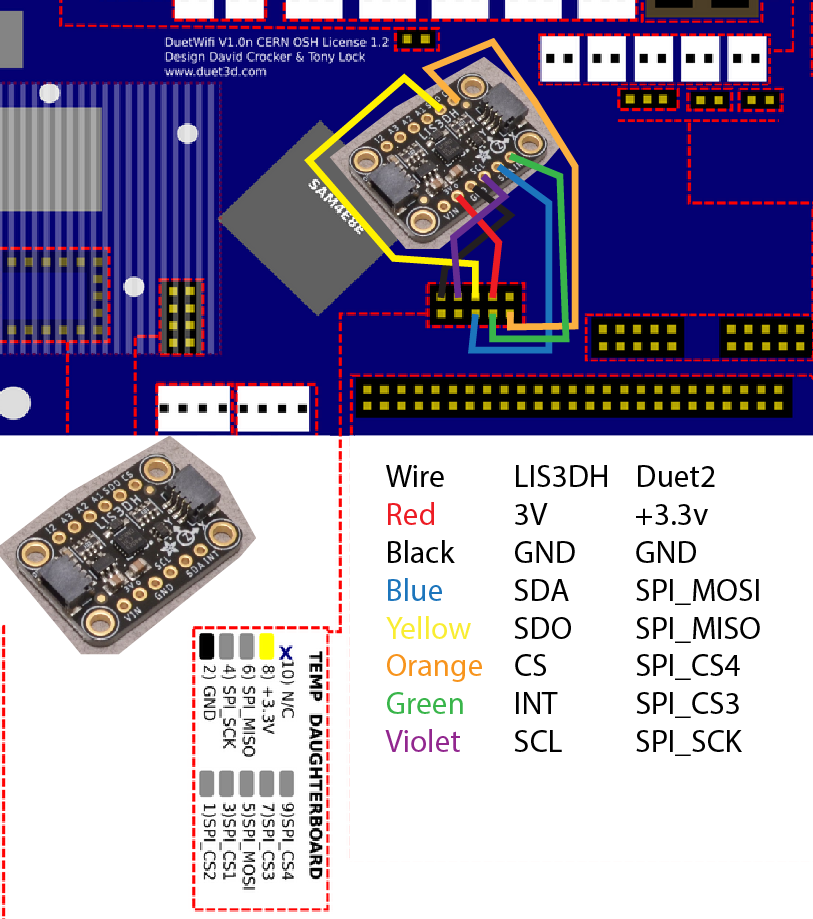
-
iPad pro 10.5 holder for DWCposted in Duet Web Control
Made myself a ipad pro 10.5 holder for my printer
can be found here
https://www.thingiverse.com/thing:5438181/files

-
Current Volumetric flow with Chartposted in Duet Web Control wishlist
I would love to see the current mm3 of volumetric flow that is being printed
just like the temp chart (make it tab) so you can see this chart instead of the temp if desired.Would be awesome to visualize the current flow rate in real time
-
RE: Current Volumetric flow with Chartposted in Duet Web Control wishlist
@jens55 im not suggesting removing the temp display. just making the chart have tabs, so you can switch from temp, to flow to speed or whatever as you wish
Latest posts made by Adamfilip
-
RE: Duet 3 Mini 5+ with 1LC, extruder Heater always onposted in Duet Hardware and wiring
@Adamfilip just realized i can add the jumper so the fan gets 24v
-
RE: Duet 3 Mini 5+ with 1LC, extruder Heater always onposted in Duet Hardware and wiring
@Phaedrux Thanks I corrected that and its working fine now. appreciate your help.
now that I moved my Cold End Fan to Out2. its working alot slower then when it was using Out0
perhaps I will just wire it up to main 24v feed instead -
Duet 3 Mini 5+ with 1LC, extruder Heater always onposted in Duet Hardware and wiring
I have Duet 3 Mini 5+ with 1LC
I double checked wiring,,
using Revo heater 24v.Connected to 1lC Out1. using GND and +Vout wires
extruder Heater is always on
not sure why.M308 S1 P"121.temp0" Y"thermistor" T100000 B4267 ; Configure sensor 1 as E3D Revo thermistor on temp0 M950 H1 C"121.out1" T1 ; Create heater 1 using temp sensor 1 and output 1 M307 H1 B0 S0.00 R2.5 C150 D5.5 ; Disable heater (S0.00), ensure no bang-bang, and tune values as needed M143 H1 S280 ; Set max temperature limit for heater 1 M563 P0 D0 H1 F0 ; Define tool 0, assign extruder 0, link heater 1, assign fan 0 M568 P0 S0 R0 -
RE: Dual X Axis Motors with Dual Endstops. Homing togethorposted in Tuning and tweaking
@oliof Awesome thanks for that!
-
RE: Dual X Axis Motors with Dual Endstops. Homing togethorposted in Tuning and tweaking
@Adamfilip ok I got it working
hope this helps someonethis is my revised home X
; homex.g ; called to home the X axis ; increase Z G91 ; relative positioning G1 H2 Z5 ; move Z relative to current position to avoid dragging nozzle over the bed G90 ; absolute positioning ; home X and U simultaneously G91 ; relative positioning M584 X0.0 U0.1 ; split X and U motors for independent homing (enable endstops) G1 H1 X-200 U-200 F600 ; coarse home X and U motors simultaneously M584 X0.0:0.1 ; rejoin X and U motors to move together G90 ; absolute positioning ; decrease Z again G91 ; relative positioning G1 H2 Z-5 F6000 ; move Z relative to current position G90 ; absolute positioning and here is my configcode_text
; Drives Configuration M569 P0.0 S1 D2 ; Drive 0.0 (X motor) forwards M569 P0.1 S0 D2 ; Drive 0.1 (U motor / X2) backwards M569 P0.2 S0 D2 ; Drive 0.2 (Y motor) backwards ;M569 P0.3 S1 D2 ; Drive 0.3 (Z motor) forwards ; M569 P0.4 S1 D2 ; Uncomment if you have an extruder motor on drive 0.4 ; Motor Idle Settings M906 I30 ; Set motor idle current to 30% M84 S30 ; Set idle timeout to 30 seconds ; Axis Mapping M584 X0.0:0.1 Y0.2 Z0.3 E0.4 ; Assign drives to axes (both X motors to X axis) ; Microstepping and Steps per mm M350 X16 Y16 Z16 E16 I1 ; Configure microstepping with interpolation M92 X80 Y80 Z400 E420 ; Set steps per mm ; Axis Limits M208 X0:400 Y0:300 Z0:200 ; Set axis travel limits ; Motor Currents M906 X1100 Y1100 Z800 E800 ; Set motor currents (mA) ; Accelerations and Speeds M566 X900 Y900 Z12 E120 ; Set maximum instantaneous speed changes (mm/min) M203 X6000 Y6000 Z180 E6000 ; Set maximum speeds (mm/min) M201 X500 Y500 Z20 E1000 ; Set accelerations (mm/s^2) ; Kinematics M669 K0 ; Configure Cartesian kinematics ; Endstops Configuration M574 X1 S1 P"io5.in" ; X axis endstop at min position on io5.in M574 U1 S1 P"io6.in" ; U axis endstop at min position on io6.in M574 Y2 S1 P"io3.in" ; Y axis endstop at max position on io3.in M574 Z1 S1 P"io4.in" ; Z axis endstop at min position on io4.in ; Tools Configuration M563 P0 D0 H1 F0 ; Define tool 0 M568 P0 R0 S0 ; Set tool 0 active and standby temperatures to 0C ; Allow Movement Without Homing M564 H0 S0 ; Allow movement without homing -
Dual X Axis Motors with Dual Endstops. Homing togethorposted in Tuning and tweaking
Duet 3 Mini 5+ Wifi
my X axis has two X motors, each with its own X endstop
I want them to both home simultaneously. and then each stop independently. to square the X axis each time.I have Split X2 to be U
; Drives Configuration M569 P0.0 S1 D2 ; Drive 0.0 (X motor) forwards M569 P0.1 S1 D2 ; Drive 0.1 (U motor) forwards M569 P0.2 S0 D2 ; Drive 0.2 (Y motor) backwards M569 P0.3 S1 D2 ; Drive 0.3 (Z motor) forwards ; M569 P0.4 S1 D2 ; Uncomment if you have an extruder motor on drive 0.4 ; Motor Idle Settings M906 I30 ; Set motor idle current to 30% M84 S30 ; Set idle timeout to 30 seconds ; Axis Mapping M584 X0.0:0.1 Y0.2 Z0.3 E0.4 ; Assign drives to axes (both X motors to X axis) ; Note: E0.4 is for the extruder; adjust if necessary ; Microstepping and Steps per mm M350 X16 U16 Y16 Z16 E16 I1 ; Configure microstepping with interpolation M92 X80 U80 Y80 Z400 E420 ; Set steps per mm ; Axis Limits M208 X0:400 U0:400 Y0:300 Z0:200 ; Set axis travel limits for X and U axes ; Motor Currents M906 X800 U800 Y800 Z800 E800 ; Set motor currents (mA) ; Accelerations and Speeds M566 X900 U900 Y900 Z12 E120 ; Set maximum instantaneous speed changes (mm/min) M203 X6000 U6000 Y6000 Z180 E6000 ; Set maximum speeds (mm/min) M201 X500 U500 Y500 Z20 E1000 ; Set accelerations (mm/s^2) ; Kinematics M669 K0 ; Configure Cartesian kinematics ; Endstops Configuration M574 X1 S1 P"io5.in" ; X axis endstop at min position on io5.in M574 U1 S1 P"io6.in" ; U axis endstop at min position on io6.in M574 Y2 S1 P"io3.in" ; Y axis endstop at max position on io3.in M574 Z1 S1 P"io4.in" ; Z axis endstop at min position on io4.inHomeX code
; homex.g ; called to home the X axis ; ; generated by RepRapFirmware Configuration Tool v3.5.5 on Mon Nov 11 2024 17:58:55 GMT-0500 (Eastern Standard Time) ; increase Z G91 ; relative positioning G1 H2 Z5 ; move Z relative to current position to avoid dragging nozzle over the bed G90 ; absolute positioning ; home X G91 ; relative positioning ; calculate how far X can travel to the max endstop var maxTravel = 200 M584 X0.0 X0.1 ; split X motors for independent homing (both motors should move simultaneously) G1 H1 X0.0-200 X0.1-200 F600 ; coarse home both X motors simultaneously and independently G1 X5 F6000 ; move back 5mm G1 H1 X0.0-200 X0.1-200 F300 ; fine home both X motors simultaneously and independently M584 X0.0:0.1 ; rejoin X motors to move together G90 ; absolute positioning ; decrease Z again G91 ; relative positioning G1 H2 Z-5 F6000 ; move Z relative to current position G90 ; absolute positioningso far its not homing properly
things move fine when im manually moving X. but when trying to home X and U (X2) at same time U isnt moving -
RE: Duet2 with Z scanning probeposted in Duet Hardware and wiring
@jay_s_uk is there any way to add CAN-FD to the Duet2wifi?
-
Duet2 with Z scanning probeposted in Duet Hardware and wiring
Possible to use Z scanning probe with Duet2wifi?
-
RE: Smoke is badposted in General Discussion
@oliof yep I double checked and sure enough wire color was messed up and phases were in wrong order.
only had power at 950ma. works now on different driver -
RE: Smoke is badposted in General Discussion
@dc42 Thanks
I had just purchased a new Stepper cable and with power off i plugged into the stepper and driver plug.
I dont mess with things when power is on. I do need to check the new cable incase it has any stray hairs causing a short.