Error: short-to-ground
-
Hello,
I have the following problem with my Duet 2 Wifi v1.04: When I try to move the motors X and Y via the Duet Web Control I get the error message "short-to-ground" on motor drive 0 or 1. First I checked the motor cables but everything is fine. The error occurs when I try to run the motors with the home button but also when I want to run motors without homing with S2 (via G-Code Console). The same error also occurs if I have connected only one Z-motor. Interesting is, if I have connected my two Z-motors everything works fine. And if I connect the X and Y motors to the two Z contacts instead, everything works great. This means that the motors are wired correctly. I also tried to vary the currents but without success. If the motors disconnect and I send a motion command there is no error message except the warning that the motors are not connected. When I looking at the board I can't see any damages.
I found a similar problem in the forum (https://forum.duet3d.com/topic/2451/error-short-to-ground-on-drivers-0-1/8). Unfortunately the problem could not be solved and it was recommended to exchange the board.Can anybody help me or does the board have to be exchanged?
Some more information:
- Two Z-axes from E3D (MT-1702E133G6-365E) with 1.3A/phase and 1.8°.
- For my CoreXY I use two motors with 1.7A/phase and 0.9° (42BYGHM809)
- Software is up to date
Greetings from Germany
-
@erlerprint3d Make sure you're on 2.02 on the firmware.
https://github.com/dc42/RepRapFirmware/releases -
yes i have the current version but i made another update to be on the safe side and same error as before

M122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 2.02(RTOS) running on Duet WiFi 1.02 or later
Board ID: 08DGM-917NK-F2MS4-7JKD6-3SN6T-9GU4H
Used output buffers: 1 of 20 (9 max)
=== RTOS ===
Static ram: 25524
Dynamic ram: 98524 of which 0 recycled
Exception stack ram used: 272
Never used ram: 6752
Tasks: NETWORK(ready,648) HEAT(blocked,1232) MAIN(running,3844) IDLE(ready,200)
Owned mutexes:
=== Platform ===
Last reset 00:01:14 ago, cause: power up
Last software reset at 2019-01-13 19:10, reason: User, spinning module GCodes, available RAM 6752 bytes (slot 1)
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d
Error status: 0
Free file entries: 10
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest block write time: 0.0ms, max retries 0
MCU temperature: min 26.9, current 31.2, max 31.3
Supply voltage: min 24.2, current 24.3, max 24.5, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: standstill, SG min/max not available
Driver 1: standstill, SG min/max not available
Driver 2: standstill, SG min/max not available
Driver 3: standstill, SG min/max not available
Driver 4: standstill, SG min/max not available
Date/time: 2019-01-13 19:15:35
Cache data hit count 274890192
Slowest loop: 2.26ms; fastest: 0.07ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0
=== Move ===
Hiccups: 0, StepErrors: 0, LaErrors: 0, FreeDm: 240, MinFreeDm: 240, MaxWait: 0ms, Underruns: 0, 0
Scheduled moves: 0, completed moves: 0
Bed compensation in use: none
Bed probe heights: 0.000 0.000 0.000 0.000 0.000
=== Heat ===
Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Stack records: 1 allocated, 0 in use
Movement lock held by null
http is idle in state(s) 0
telnet is idle in state(s) 0
file is idle in state(s) 0
serial is idle in state(s) 0
aux is idle in state(s) 0
daemon is idle in state(s) 0
queue is idle in state(s) 0
autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 22.81ms; fastest: 0.00ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 1 of 8- WiFi -
Network state is running
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 0
WiFi firmware version 1.22
WiFi MAC address b4:e6:2d:52:f3:36
WiFi Vcc 3.38, reset reason Turned on by main processor
WiFi flash size 4194304, free heap 28832
WiFi IP address 192.168.1.100
WiFi signal strength -30dBm, reconnections 0, sleep mode modem
Socket states: 0 0 0 0 0 0 0 0
- WiFi -
-
First, check that the back of the Duet isn't shorting against anything conductive. For example, it if is mounted above a metal plate, check that it is stood off sufficiently from that plate so that it can't possibly short against it.
If that's not the problem, is it a genuine Duet or a clone? Genuine Duets are fully tested at the factory, and although it's not impossible that one stepper driver could fail shortly testing, it's most unlikely that two would.
If you command X or Y movement with the motors not connected, do you still get the short-to-ground error message?
-
@dc42
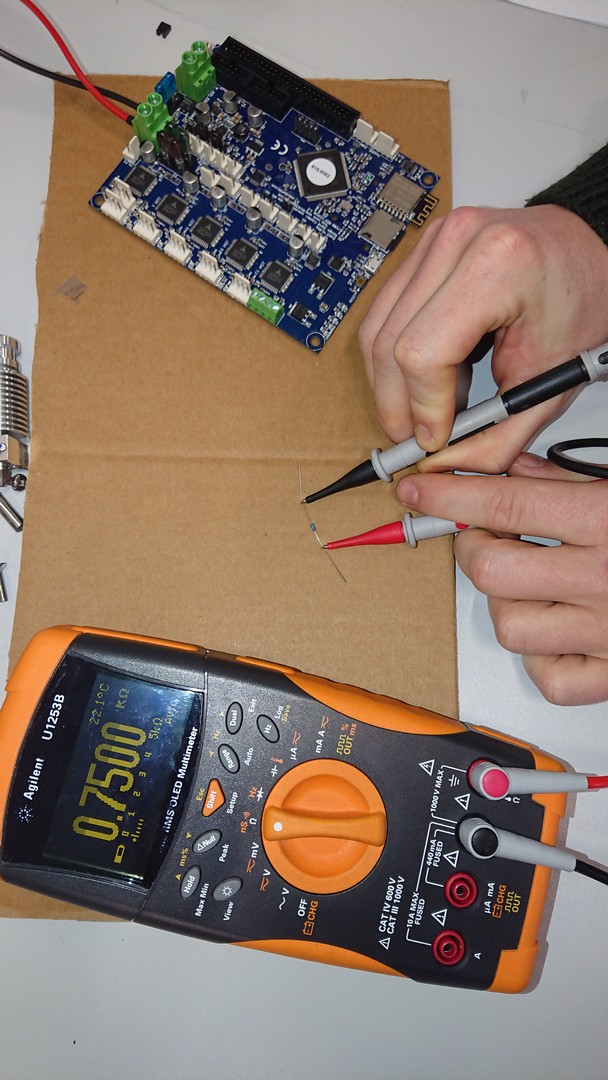
Inside the printer i use standoffs only for the mounting holes and outside the printer i use cardboard under the board (see the pictures). By both variante the same error occurs. It is a genuine Duet from makerdise.com.
If I command X or Y movement with the no motors connected, I have no error message, only the warning see in the picture.



-
- Please use a multimeter to measure the resistance of each phase from the connector at the Duet end. Specifically:
- Measure the resistance between the red and blue wires
- Measure the resistance between the green and black wires
- There should be "infinite" resistance between either of red/blue and either of green/black.
-
How long is the cable between the Duet and the motor? The current firmware has the short-to-ground detection set to maximum sensitivity, and it's possible that using a cable with a lot of capacitance could trigger it - although we've never heard of that happening before.
-
Please confirm that your cable and motor don't include any other components, such as EMI suppression capacitors.
When stepper driver chips are faulty, one of the symptoms is spurious short-to-ground reports; but they are normally reported whether or not the motor is connected.
-
additional: before the error message "short-to-ground" appears, the motor moves a very small distance and that's relatively loud
-
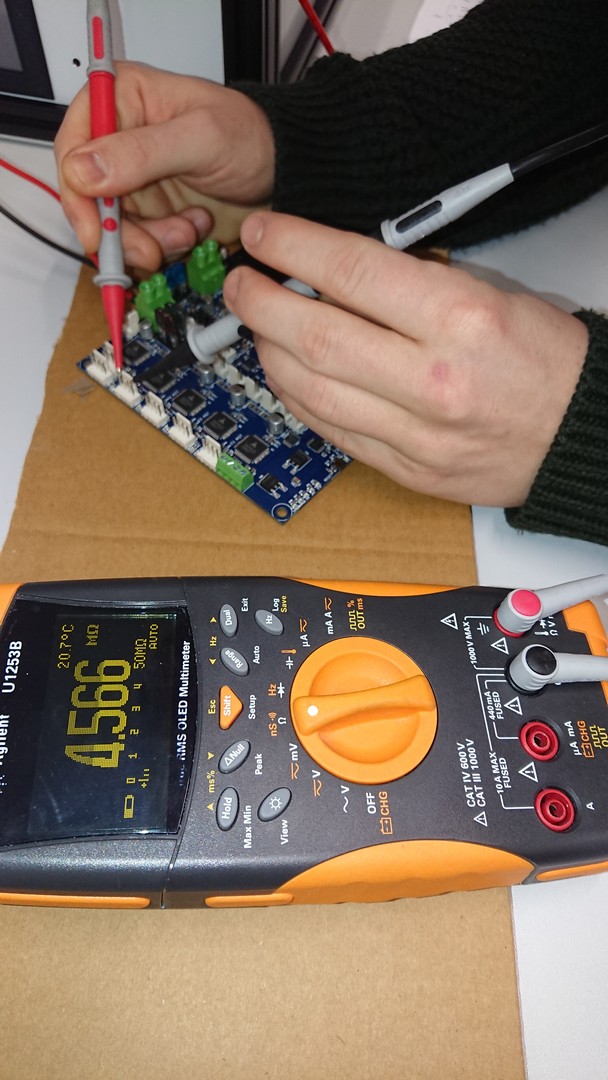
I measure 5MOhm for every combination except if I remove the jumper then I measure as follows (only for the Z-contacts): 5MOhm between 1B+2A on ZA and 5MOhm between 2B and 1A on ZB and the rest is infinite.
-
Do you really mean 5Mohm? That doesn't make sense, unless you have something (e.g. TL smoothers) connected between the Duet and the motors.
-
Tomorrow I'll repeat the measurement and send you a picture.
-
First I checked the multimeter with a 750Ohm resistance and it works correctly. Then I repeated the measurements and measured 5MOhm again. The board was switched off. I think that was the mistake with the last measurement?
With the board switched on (only 24V) I measure everywhere infinity and between 2B(ZA)/2A(ZB) and 1A(ZA)/1B(ZB) no resistance (exactly -0.03Ohm).
-
@erlerprint3d said in Error: short-to-ground:
First I checked the multimeter with a 750Ohm resistance and it works correctly. Then I repeated the measurements and measured 5MOhm again. The board was switched off. I think that was the mistake with the last measurement?
With the board switched on (only 24V) I measure everywhere infinity and between 2B(ZA)/2A(ZB) and 1A(ZA)/1B(ZB) no resistance (exactly -0.03Ohm).
I'm 99 percent sure he wants you to measure the motor resistance per phase and then measure the resistance between phases to ensure there isn't a short. Take the motor and measure the resistance betweed red and blue, then green and black, and finally between red and black. Do this at the connector that plugs into the duet.
-
Okay, then I misunderstood that. However, I just don't understand why the motors work fine when I use both z-contacts.
Here are the new measurements:
- both Z-Motors (MT-1702E133G6-365E) --> between red and black or blue and green 2.1Ohm; other combination "infinity"
- both CoreXY-Motors (42BYGHM809) --> between red and black or blue and green 1.8Ohm; other combination "infinity"
- max. cable length is 600mm
-
so based on you last measurements, the correct wire order for the connector on the board would be Red, Black, Green, Blue.
(Your current order is Red, Blue, Green, Black, as seen in above photo) -
What is your motor current set to? I had this issue when I accidentally set the motor current way to low.
-
@erlerprint3d said in Error: short-to-ground:
Okay, then I misunderstood that. However, I just don't understand why the motors work fine when I use both z-contacts.
Here are the new measurements:
- both Z-Motors (MT-1702E133G6-365E) --> between red and black or blue and green 2.1Ohm; other combination "infinity"
- both CoreXY-Motors (42BYGHM809) --> between red and black or blue and green 1.8Ohm; other combination "infinity"
- max. cable length is 600mm
Are you sure the colors are correct? If they are you need to rewire your connectors.
-
Yes, it looks like your motors have nonstandard wire colours. This can easily happen if the motors have plug-and-socket connectors on them, and the motors and the cables were not made by the same company.
When you have the motors wired correctly, with power off on the Duet and the motor connected to the 4-pin connector on the Duet, you should measure a few ohms resistance between the 2 pins at one end of the connector, also a few homes resistance between the 2 pins at the other end, and infinity (or several megohms) between the other pairs of pins.
When you connected 2 motors to the Za and Zb connectors, I guess the crossed wires in the 2 sets of cables cancelled out, because Za and Zb on the Duet are in series.
Fortunately, the short-to-ground detection in the drivers appears to have kicked in fast enough to avoid damage to the drivers.
-
@dc42 @Surgikill For me the motors are all connected correctly and the resistances are right. To be on the safe side I have illustrated everything in the pictures. Maybe this will help us to avoid misunderstandings. Or I am simply too stupid for that shit.

@BPisLife I had already tested the motors with higher currents (as in the data sheet). Without success.


-
@erlerprint3d said in Error: short-to-ground:
Okay, then I misunderstood that. However, I just don't understand why the motors work fine when I use both z-contacts.
Here are the new measurements:
- both Z-Motors (MT-1702E133G6-365E) --> between red and black or blue and green 2.1Ohm; other combination "infinity"
- both CoreXY-Motors (42BYGHM809) --> between red and black or blue and green 1.8Ohm; other combination "infinity"
- max. cable length is 600mm
Your last pictures contradict what you said earlier, or did you mean between red an blue 2.1 Ohmn and between Black and Green 2.1 Ohm?? Anyway did you verify the coils on the motor itself (without using a cable)?
EDIT I see now you measure between Red and black 2.1Ohm, so you need to put the cables in the order I told you earlier...
-
Ignore the A and B designations. Trinamic name the phases 1 and 2, and the polarities within a phase A and B, and that is how the pins are labeled on the Duet. But the manufacturer of your stepper drivers has named the phases A and B. Your measurements confirm that you have the motors wired to the Duet incorrectly. See my previous post for what resistances you should measure when they are wired correctly.
It's a shame that the manufacturers of stepper drivers and stepper motors can't agree on a universal naming convention for the 4 connections.