issues installing on PI 3 B+
-
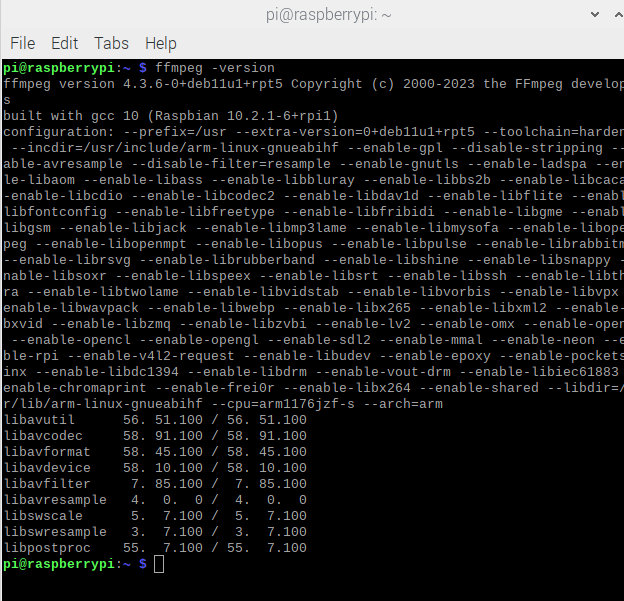
the ffmpeg is as follow
as for the stream i have a real hard time to make the videostream works because of the failing link
sudo pip3 install opencv-contrib-python==3.4.4.19
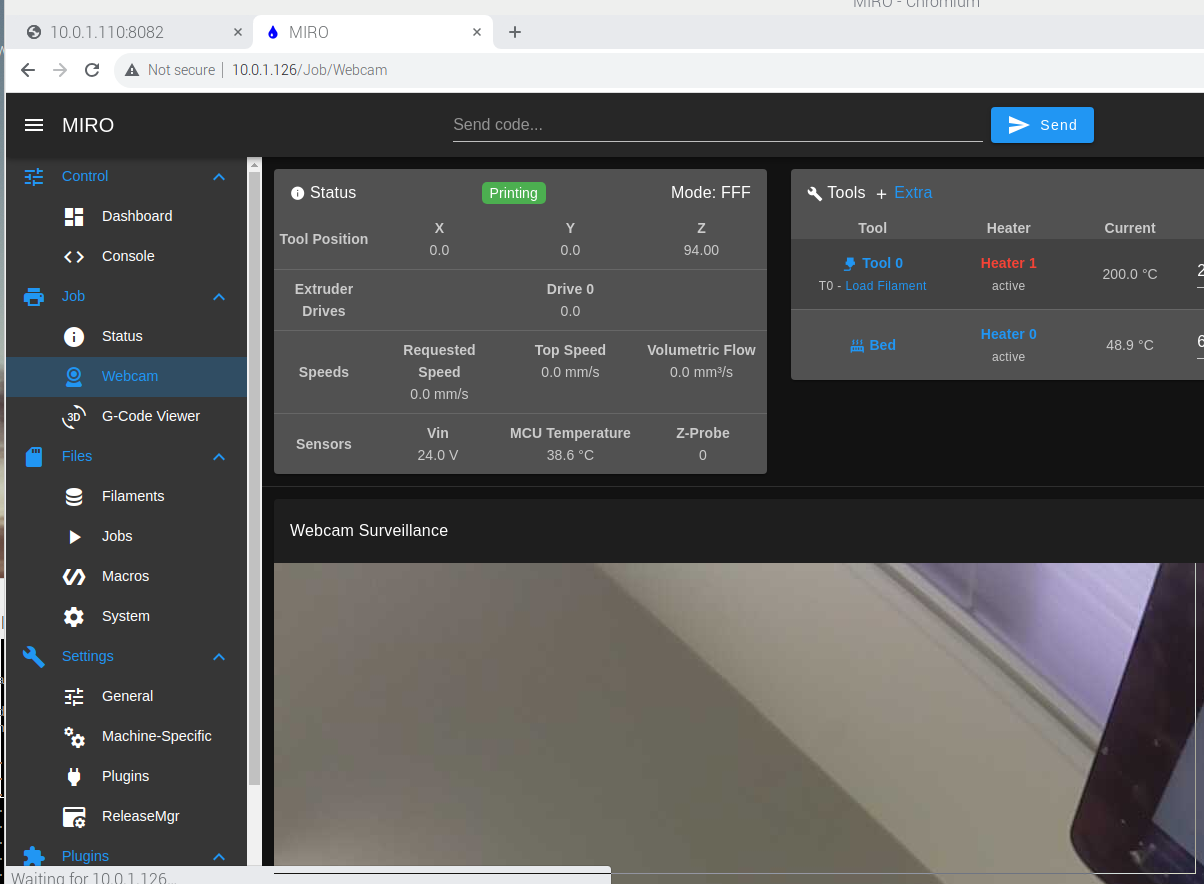
i used the last file you gave me and here are the results seem to be working and connecting now but the main issue now maybe the videostream here are the screen shots and the log file
2023-12-20 11:58:45,832 - MainThread - DuetLapse3 Version --- 5.3.5
2023-12-20 11:58:45,833 - MainThread - Requires Duet3d Version --- 3.5.0-rc.1
2023-12-20 11:58:45,834 - MainThread - Process Id --- 2368
2023-12-20 11:58:45,834 - MainThread - -------------------------------------------------------------------------------2023-12-20 11:58:45,835 - MainThread - seconds has been changed to 30
2023-12-20 11:58:45,836 - MainThread - poll has been changed to 10
2023-12-20 11:58:45,838 - MainThread - dontwait has been changed to True
2023-12-20 11:58:45,839 - MainThread - ################### Options at start of this print job #####################
2023-12-20 11:58:45,840 - MainThread - # Simulate
2023-12-20 11:58:45,840 - MainThread - -simulate = off
2023-12-20 11:58:45,841 - MainThread - # Environment
2023-12-20 11:58:45,841 - MainThread - -duet = 10.0.1.126
2023-12-20 11:58:45,842 - MainThread - -password = reprap
2023-12-20 11:58:45,842 - MainThread - -basedir = /home/pi/DuetLapse
2023-12-20 11:58:45,843 - MainThread - -poll = 10
2023-12-20 11:58:45,843 - MainThread - -instances = single
2023-12-20 11:58:45,843 - MainThread - -logtype = both
2023-12-20 11:58:45,843 - MainThread - -nolog = False
2023-12-20 11:58:45,844 - MainThread - -verbose = True
2023-12-20 11:58:45,844 - MainThread - -host = 0.0.0.0
2023-12-20 11:58:45,844 - MainThread - -port = 8082
2023-12-20 11:58:45,844 - MainThread - -keeplogs = False
2023-12-20 11:58:45,845 - MainThread - -novideo = False
2023-12-20 11:58:45,845 - MainThread - -deletepics = False
2023-12-20 11:58:45,845 - MainThread - -maxffmpeg = 2
2023-12-20 11:58:45,846 - MainThread - -keepfiles = False
2023-12-20 11:58:45,846 - MainThread - # Execution
2023-12-20 11:58:45,846 - MainThread - -dontwait = True
2023-12-20 11:58:45,846 - MainThread - -seconds = 30
2023-12-20 11:58:45,847 - MainThread - -detect = none
2023-12-20 11:58:45,847 - MainThread - -pause = no
2023-12-20 11:58:45,848 - MainThread - -numlayers = 1
2023-12-20 11:58:45,849 - MainThread - -movehead = [0, 0]
2023-12-20 11:58:45,850 - MainThread - -rest = 1
2023-12-20 11:58:45,850 - MainThread - -standby = False
2023-12-20 11:58:45,851 - MainThread - -restart = False
2023-12-20 11:58:45,851 - MainThread - # Camera
2023-12-20 11:58:45,852 - MainThread - -camera1 = stream
2023-12-20 11:58:45,852 - MainThread - -camera2
2023-12-20 11:58:45,853 - MainThread - -weburl1 = http://10.0.1.110/stream
2023-12-20 11:58:45,853 - MainThread - -weburl2
2023-12-20 11:58:45,854 - MainThread - # Video
2023-12-20 11:58:45,854 - MainThread - -extratime = 0
2023-12-20 11:58:45,855 - MainThread - -fps = 10
2023-12-20 11:58:45,855 - MainThread - -minvideo = 5
2023-12-20 11:58:45,855 - MainThread - -maxvideo = 0
2023-12-20 11:58:45,856 - MainThread - # Overrides
2023-12-20 11:58:45,856 - MainThread - -camparam1
2023-12-20 11:58:45,857 - MainThread - -camparam2
2023-12-20 11:58:45,857 - MainThread - -vidparam1
2023-12-20 11:58:45,858 - MainThread - -vidparam2
2023-12-20 11:58:45,859 - MainThread - # UI
2023-12-20 11:58:45,859 - MainThread - -hidebuttons = False
2023-12-20 11:58:45,860 - MainThread - # Special Functions
2023-12-20 11:58:45,860 - MainThread - -execkey
2023-12-20 11:58:45,861 - MainThread - -M3291 = M3291
2023-12-20 11:58:45,861 - MainThread - -----------------------------------------------------------------------2023-12-20 11:58:45,862 - MainThread - ************************************************************************************
2023-12-20 11:58:45,862 - MainThread - Warning: -seconds 30 and -detect none
2023-12-20 11:58:45,863 - MainThread - This combination implies -dontwait and will be set automatically
2023-12-20 11:58:45,863 - MainThread - ************************************************************************************2023-12-20 11:58:45,865 - MainThread - ##########################################################
2023-12-20 11:58:45,866 - MainThread - Will start capturing images immediately
2023-12-20 11:58:45,867 - MainThread - ##########################################################2023-12-20 11:58:45,868 - MainThread - ##########################################################
2023-12-20 11:58:45,869 - MainThread - Video will be created when printing ends
2023-12-20 11:58:45,870 - MainThread - or if requested from the UI or M3291 P"DuetLapse3.completed"
2023-12-20 11:58:45,871 - MainThread - ##########################################################2023-12-20 11:58:45,873 - MainThread - ##########################################################
2023-12-20 11:58:45,874 - MainThread - If running from a console using the command line
2023-12-20 11:58:45,874 - MainThread - Press Ctrl+C one time to stop the program and create a video.
2023-12-20 11:58:45,875 - MainThread - ##########################################################2023-12-20 11:58:45,877 - MainThread - ***** Initializing state and counters *****
2023-12-20 11:58:45,880 - MainThread - ##########################################################
2023-12-20 11:58:45,880 - MainThread - ***** Started http listener on port 8082*****
2023-12-20 11:58:45,881 - MainThread - ##########################################################2023-12-20 11:58:45,882 - MainThread - Logging in to Printer
2023-12-20 11:58:45,882 - MainThread - 0 url: http://10.0.1.126/rr_disconnect post: False
2023-12-20 11:58:46,036 - MainThread - 0 url: http://10.0.1.126/rr_connect?password=reprap post: False
2023-12-20 11:58:46,086 - MainThread - !!!!! Connected to printer Standalone !!!!!
2023-12-20 11:58:46,087 - MainThread - !!!!! Checking for firmware version 3.5.0-rc.1 !!!!!
2023-12-20 11:58:46,087 - MainThread - 0 url: http://10.0.1.126/rr_model?key=boards post: False
2023-12-20 11:58:46,151 - MainThread - Version Check returned --> 3.5.0-rc.1+102
2023-12-20 11:58:46,152 - MainThread - ###############################################################
2023-12-20 11:58:46,152 - MainThread - Connected to printer at 10.0.1.126
2023-12-20 11:58:46,152 - MainThread - Using Duet version 3.5.0-rc.1+102
2023-12-20 11:58:46,152 - MainThread - Using API interface rr_model
2023-12-20 11:58:46,153 - MainThread - ###############################################################2023-12-20 11:58:46,153 - MainThread - isPlugin ignored - only valid for SBC
2023-12-20 11:58:46,153 - MainThread - Initializing DL3msg queue
2023-12-20 11:58:46,153 - MainThread - 0 url: http://10.0.1.126/rr_gcode?gcode=M3291 B"Clear" post: False
2023-12-20 11:58:46,198 - mainLoop - ###########################
2023-12-20 11:58:46,199 - MainThread - Initiating with action set to start
2023-12-20 11:58:46,199 - mainLoop - Starting mainLoop
2023-12-20 11:58:46,199 - MainThread - Calling nextaction start from main --> startup --> nextAction
2023-12-20 11:58:46,200 - mainLoop - ###########################2023-12-20 11:58:46,200 - MainThread - ++++++ start state requested ++++++
2023-12-20 11:58:46,200 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 11:58:46,201 - MainThread - nextAction requested stopCaptureLoop
2023-12-20 11:58:46,201 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 11:58:46,201 - MainThread - captureLoop is not running
2023-12-20 11:58:46,203 - MainThread - nextAction satisfied waitforCaptureLoop
2023-12-20 11:58:46,209 - MainThread - ++++++ Determining next logical action ++++++
2023-12-20 11:58:46,210 - MainThread - ++++++ Entering start state ++++++
2023-12-20 11:58:46,210 - MainThread - nextAction exiting normally
2023-12-20 11:58:46,227 - mainLoop - Standalone Status is busy
2023-12-20 11:58:46,228 - mainLoop - Error Processing message queue
2023-12-20 11:58:46,228 - mainLoop - 'global'
2023-12-20 11:58:51,234 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 11:58:51,235 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 11:58:51,267 - mainLoop - Standalone Status is idle
2023-12-20 11:58:51,267 - mainLoop - Error Processing message queue
2023-12-20 11:58:51,268 - mainLoop - 'global'
2023-12-20 11:58:56,273 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 11:58:56,273 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 11:58:56,529 - mainLoop - Standalone Status is idle
2023-12-20 11:58:56,529 - mainLoop - Error Processing message queue
2023-12-20 11:58:56,530 - mainLoop - 'global'
2023-12-20 11:58:56,530 - mainLoop - ****** Duet status changed to: idle from unknown *****
2023-12-20 11:58:56,530 - mainLoop - ****** stateMachine:
2023-12-20 11:58:56,531 - mainLoop - newstate = Capturing
2023-12-20 11:58:56,531 - mainLoop - currentState = Waiting
2023-12-20 11:58:56,531 - mainLoop - duetStatus = idle
2023-12-20 11:58:56,532 - mainLoop - lastDuetStatus = unknown
2023-12-20 11:58:56,532 - mainLoop - dontwait = True
2023-12-20 11:58:56,532 - mainLoop - detect = none
2023-12-20 11:58:56,532 - mainLoop - terminateState = -1
2023-12-20 11:58:56,533 - mainLoop - ******
2023-12-20 11:58:56,533 - mainLoop - ****** Print State changed to: Capturing from Waiting*****
2023-12-20 11:58:56,533 - mainLoop - Calling oneInterval for Camera 1
2023-12-20 11:58:56,533 - mainLoop - Calling Layer from captureLoop --> oneInterval --> getDuet
2023-12-20 11:58:56,534 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=job.layer post: False
2023-12-20 11:58:56,612 - mainLoop - Current Layer is -1
2023-12-20 11:58:56,613 - mainLoop - elapsed: 10.735199928283691
2023-12-20 11:58:56,613 - mainLoop - ****** stateMachine:
2023-12-20 11:58:56,613 - mainLoop - newstate = Waiting
2023-12-20 11:58:56,614 - mainLoop - currentState = Capturing
2023-12-20 11:58:56,614 - mainLoop - duetStatus = idle
2023-12-20 11:58:56,614 - mainLoop - lastDuetStatus = unknown
2023-12-20 11:58:56,614 - mainLoop - dontwait = True
2023-12-20 11:58:56,615 - mainLoop - detect = none
2023-12-20 11:58:56,615 - mainLoop - terminateState = -1
2023-12-20 11:58:56,615 - mainLoop - ******
2023-12-20 11:58:56,615 - mainLoop - ****** Print State changed to: Waiting from Capturing*****
2023-12-20 11:59:01,621 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 11:59:01,622 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 11:59:01,783 - mainLoop - Standalone Status is idle
2023-12-20 11:59:01,785 - mainLoop - Error Processing message queue
2023-12-20 11:59:01,785 - mainLoop - 'global'
2023-12-20 11:59:06,792 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 11:59:06,793 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 11:59:07,242 - mainLoop - Standalone Status is idle
2023-12-20 11:59:07,243 - mainLoop - Error Processing message queue
2023-12-20 11:59:07,244 - mainLoop - 'global'
2023-12-20 11:59:07,245 - mainLoop - ****** stateMachine:
2023-12-20 11:59:07,245 - mainLoop - newstate = Capturing
2023-12-20 11:59:07,246 - mainLoop - currentState = Waiting
2023-12-20 11:59:07,246 - mainLoop - duetStatus = idle
2023-12-20 11:59:07,247 - mainLoop - lastDuetStatus = idle
2023-12-20 11:59:07,247 - mainLoop - dontwait = True
2023-12-20 11:59:07,248 - mainLoop - detect = none
2023-12-20 11:59:07,249 - mainLoop - terminateState = -1
2023-12-20 11:59:07,249 - mainLoop - ******
2023-12-20 11:59:07,250 - mainLoop - ****** Print State changed to: Capturing from Waiting*****
2023-12-20 11:59:07,250 - mainLoop - Calling oneInterval for Camera 1
2023-12-20 11:59:07,251 - mainLoop - Calling Layer from captureLoop --> oneInterval --> getDuet
2023-12-20 11:59:07,252 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=job.layer post: False
2023-12-20 11:59:07,611 - mainLoop - Current Layer is -1
2023-12-20 11:59:07,612 - mainLoop - elapsed: 21.73440194129944
2023-12-20 11:59:07,613 - mainLoop - ****** stateMachine:
2023-12-20 11:59:07,614 - mainLoop - newstate = Waiting
2023-12-20 11:59:07,614 - mainLoop - currentState = Capturing
2023-12-20 11:59:07,615 - mainLoop - duetStatus = idle
2023-12-20 11:59:07,615 - mainLoop - lastDuetStatus = idle
2023-12-20 11:59:07,616 - mainLoop - dontwait = True
2023-12-20 11:59:07,616 - mainLoop - detect = none
2023-12-20 11:59:07,617 - mainLoop - terminateState = -1
2023-12-20 11:59:07,617 - mainLoop - ******
2023-12-20 11:59:07,618 - mainLoop - ****** Print State changed to: Waiting from Capturing*****even though its giving this ( empty frame am using USB camera i have a ribbon camera too how to force videostream to use the ribbon camera ?
-
From memory - that version of ffmpeg is OK.
As before, it looks like DuetLapse is working and the previous issues were installation / configuration.videostream uses opencv but that library is notorious for being difficult to install. Many of the guides simply do not work. That's not really the fault of the guides, mainly its to do with all the possible variations of operating systems etc that opencv has to deal with.
There are several documents here that may help.
https://github.com/stuartofmt/Pi-Notes
but it all depends on the version if the pi operating system you are using.On my pi (using a pi camera and Debian Bullseye) I use a plugin that I've developed because it does not need to use opencv. It uses apis developed by the pi team BUT those do not support USB cameras.
Having said all that - you might try Motion as that is a bit more self contained and may give you quicker success.
What version of the pi operating system are you using?
-
see my PI os Ver below
i will try motion but if videostream is better or a must i can try the plugin you mention if you dont mind
i tried motion and now i have video in the http//:localhost:8081/stream not on 10.0.1.110:8081/stream even though it should be the same but on the DuetLapse still no video
here is my config for DuetLapse see if i need to change anything there-basedir /home/pi/DuetLapse
-duet 10.0.1.126
-port 8082
-seconds 30
-detect none
-weburl1 http://localhost:8081/stream
-verbose
-camera1 stream
log file
2023-12-20 15:10:07,155 - MainThread - DuetLapse3 Version --- 5.3.5
2023-12-20 15:10:07,156 - MainThread - Requires Duet3d Version --- 3.5.0-rc.1
2023-12-20 15:10:07,157 - MainThread - Process Id --- 3116
2023-12-20 15:10:07,157 - MainThread - -------------------------------------------------------------------------------2023-12-20 15:10:07,159 - MainThread - seconds has been changed to 30
2023-12-20 15:10:07,161 - MainThread - poll has been changed to 10
2023-12-20 15:10:07,162 - MainThread - dontwait has been changed to True
2023-12-20 15:10:07,163 - MainThread - ################### Options at start of this print job #####################
2023-12-20 15:10:07,164 - MainThread - # Simulate
2023-12-20 15:10:07,165 - MainThread - -simulate = off
2023-12-20 15:10:07,166 - MainThread - # Environment
2023-12-20 15:10:07,166 - MainThread - -duet = 10.0.1.126
2023-12-20 15:10:07,167 - MainThread - -password = reprap
2023-12-20 15:10:07,168 - MainThread - -basedir = /home/pi/DuetLapse
2023-12-20 15:10:07,169 - MainThread - -poll = 10
2023-12-20 15:10:07,170 - MainThread - -instances = single
2023-12-20 15:10:07,171 - MainThread - -logtype = both
2023-12-20 15:10:07,171 - MainThread - -nolog = False
2023-12-20 15:10:07,172 - MainThread - -verbose = True
2023-12-20 15:10:07,172 - MainThread - -host = 0.0.0.0
2023-12-20 15:10:07,173 - MainThread - -port = 8082
2023-12-20 15:10:07,174 - MainThread - -keeplogs = False
2023-12-20 15:10:07,175 - MainThread - -novideo = False
2023-12-20 15:10:07,176 - MainThread - -deletepics = False
2023-12-20 15:10:07,177 - MainThread - -maxffmpeg = 2
2023-12-20 15:10:07,178 - MainThread - -keepfiles = False
2023-12-20 15:10:07,179 - MainThread - # Execution
2023-12-20 15:10:07,180 - MainThread - -dontwait = True
2023-12-20 15:10:07,180 - MainThread - -seconds = 30
2023-12-20 15:10:07,181 - MainThread - -detect = none
2023-12-20 15:10:07,181 - MainThread - -pause = no
2023-12-20 15:10:07,181 - MainThread - -numlayers = 1
2023-12-20 15:10:07,182 - MainThread - -movehead = [0, 0]
2023-12-20 15:10:07,182 - MainThread - -rest = 1
2023-12-20 15:10:07,182 - MainThread - -standby = False
2023-12-20 15:10:07,183 - MainThread - -restart = False
2023-12-20 15:10:07,183 - MainThread - # Camera
2023-12-20 15:10:07,183 - MainThread - -camera1 = stream
2023-12-20 15:10:07,184 - MainThread - -camera2
2023-12-20 15:10:07,184 - MainThread - -weburl1 = http://localhost:8081/stream
2023-12-20 15:10:07,184 - MainThread - -weburl2
2023-12-20 15:10:07,185 - MainThread - # Video
2023-12-20 15:10:07,185 - MainThread - -extratime = 0
2023-12-20 15:10:07,185 - MainThread - -fps = 10
2023-12-20 15:10:07,186 - MainThread - -minvideo = 5
2023-12-20 15:10:07,186 - MainThread - -maxvideo = 0
2023-12-20 15:10:07,186 - MainThread - # Overrides
2023-12-20 15:10:07,187 - MainThread - -camparam1
2023-12-20 15:10:07,187 - MainThread - -camparam2
2023-12-20 15:10:07,188 - MainThread - -vidparam1
2023-12-20 15:10:07,188 - MainThread - -vidparam2
2023-12-20 15:10:07,188 - MainThread - # UI
2023-12-20 15:10:07,189 - MainThread - -hidebuttons = False
2023-12-20 15:10:07,190 - MainThread - # Special Functions
2023-12-20 15:10:07,190 - MainThread - -execkey
2023-12-20 15:10:07,191 - MainThread - -M3291 = M3291
2023-12-20 15:10:07,191 - MainThread - -----------------------------------------------------------------------2023-12-20 15:10:07,192 - MainThread - ************************************************************************************
2023-12-20 15:10:07,192 - MainThread - Warning: -seconds 30 and -detect none
2023-12-20 15:10:07,193 - MainThread - This combination implies -dontwait and will be set automatically
2023-12-20 15:10:07,194 - MainThread - ************************************************************************************2023-12-20 15:10:07,195 - MainThread - ##########################################################
2023-12-20 15:10:07,196 - MainThread - Will start capturing images immediately
2023-12-20 15:10:07,197 - MainThread - ##########################################################2023-12-20 15:10:07,198 - MainThread - ##########################################################
2023-12-20 15:10:07,199 - MainThread - Video will be created when printing ends
2023-12-20 15:10:07,200 - MainThread - or if requested from the UI or M3291 P"DuetLapse3.completed"
2023-12-20 15:10:07,200 - MainThread - ##########################################################2023-12-20 15:10:07,201 - MainThread - ##########################################################
2023-12-20 15:10:07,201 - MainThread - If running from a console using the command line
2023-12-20 15:10:07,202 - MainThread - Press Ctrl+C one time to stop the program and create a video.
2023-12-20 15:10:07,202 - MainThread - ##########################################################2023-12-20 15:10:07,202 - MainThread - ***** Initializing state and counters *****
2023-12-20 15:10:07,205 - MainThread - ##########################################################
2023-12-20 15:10:07,207 - MainThread - ***** Started http listener on port 8082*****
2023-12-20 15:10:07,210 - MainThread - ##########################################################2023-12-20 15:10:07,211 - MainThread - Logging in to Printer
2023-12-20 15:10:07,213 - MainThread - 0 url: http://10.0.1.126/rr_disconnect post: False
2023-12-20 15:10:07,335 - MainThread - 0 url: http://10.0.1.126/rr_connect?password=reprap post: False
2023-12-20 15:10:07,393 - MainThread - !!!!! Connected to printer Standalone !!!!!
2023-12-20 15:10:07,394 - MainThread - !!!!! Checking for firmware version 3.5.0-rc.1 !!!!!
2023-12-20 15:10:07,395 - MainThread - 0 url: http://10.0.1.126/rr_model?key=boards post: False
2023-12-20 15:10:07,442 - MainThread - Version Check returned --> 3.5.0-rc.1+102
2023-12-20 15:10:07,444 - MainThread - ###############################################################
2023-12-20 15:10:07,445 - MainThread - Connected to printer at 10.0.1.126
2023-12-20 15:10:07,447 - MainThread - Using Duet version 3.5.0-rc.1+102
2023-12-20 15:10:07,448 - MainThread - Using API interface rr_model
2023-12-20 15:10:07,450 - MainThread - ###############################################################2023-12-20 15:10:07,451 - MainThread - isPlugin ignored - only valid for SBC
2023-12-20 15:10:07,453 - MainThread - Initializing DL3msg queue
2023-12-20 15:10:07,454 - MainThread - 0 url: http://10.0.1.126/rr_gcode?gcode=M3291 B"Clear" post: False
2023-12-20 15:10:07,539 - mainLoop - ###########################
2023-12-20 15:10:07,539 - MainThread - Initiating with action set to start
2023-12-20 15:10:07,541 - mainLoop - Starting mainLoop
2023-12-20 15:10:07,542 - MainThread - Calling nextaction start from main --> startup --> nextAction
2023-12-20 15:10:07,544 - mainLoop - ###########################2023-12-20 15:10:07,545 - MainThread - ++++++ start state requested ++++++
2023-12-20 15:10:07,546 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:10:07,547 - MainThread - nextAction requested stopCaptureLoop
2023-12-20 15:10:07,548 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:10:07,549 - MainThread - captureLoop is not running
2023-12-20 15:10:07,552 - MainThread - nextAction satisfied waitforCaptureLoop
2023-12-20 15:10:07,553 - MainThread - ++++++ Determining next logical action ++++++
2023-12-20 15:10:07,554 - MainThread - ++++++ Entering start state ++++++
2023-12-20 15:10:07,555 - MainThread - nextAction exiting normally
2023-12-20 15:10:07,614 - mainLoop - Standalone Status is processing
2023-12-20 15:10:07,615 - mainLoop - Error Processing message queue
2023-12-20 15:10:07,616 - mainLoop - 'global'
2023-12-20 15:10:09,259 - Thread-1 - !!!!! http call: {'displayControls': ['true']} !!!!!
2023-12-20 15:10:10,087 - Thread-2 - !!!!! http call: {'displayStatus': ['true']} !!!!!
2023-12-20 15:10:12,623 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:10:12,624 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:10:12,654 - mainLoop - Standalone Status is processing
2023-12-20 15:10:12,655 - mainLoop - Error Processing message queue
2023-12-20 15:10:12,655 - mainLoop - 'global'
2023-12-20 15:10:17,661 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:10:17,662 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:10:17,710 - mainLoop - Standalone Status is processing
2023-12-20 15:10:17,711 - mainLoop - Error Processing message queue
2023-12-20 15:10:17,712 - mainLoop - 'global'
2023-12-20 15:10:17,713 - mainLoop - ****** Duet status changed to: processing from unknown *****
2023-12-20 15:10:17,713 - mainLoop - ****** stateMachine:
2023-12-20 15:10:17,714 - mainLoop - newstate = Capturing
2023-12-20 15:10:17,715 - mainLoop - currentState = Waiting
2023-12-20 15:10:17,715 - mainLoop - duetStatus = processing
2023-12-20 15:10:17,716 - mainLoop - lastDuetStatus = unknown
2023-12-20 15:10:17,717 - mainLoop - dontwait = True
2023-12-20 15:10:17,718 - mainLoop - detect = none
2023-12-20 15:10:17,718 - mainLoop - terminateState = -1
2023-12-20 15:10:17,719 - mainLoop - ******
2023-12-20 15:10:17,720 - mainLoop - ****** Print State changed to: Capturing from Waiting*****
2023-12-20 15:10:17,721 - mainLoop - Calling oneInterval for Camera 1
2023-12-20 15:10:17,722 - mainLoop - Calling Layer from captureLoop --> oneInterval --> getDuet
2023-12-20 15:10:17,723 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=job.layer post: False
2023-12-20 15:10:17,812 - mainLoop - Current Layer is 1
2023-12-20 15:10:17,813 - mainLoop - elapsed: 10.610595464706421
2023-12-20 15:10:17,814 - mainLoop - ****** stateMachine:
2023-12-20 15:10:17,815 - mainLoop - newstate = Capturing
2023-12-20 15:10:17,816 - mainLoop - currentState = Capturing
2023-12-20 15:10:17,816 - mainLoop - duetStatus = processing
2023-12-20 15:10:17,817 - mainLoop - lastDuetStatus = unknown
2023-12-20 15:10:17,817 - mainLoop - dontwait = True
2023-12-20 15:10:17,818 - mainLoop - detect = none
2023-12-20 15:10:17,819 - mainLoop - terminateState = -1
2023-12-20 15:10:17,820 - mainLoop - ******
2023-12-20 15:10:20,089 - Thread-3 - !!!!! http call: {'displayStatus': ['true']} !!!!! -
and this is the log while printing
2023-12-20 15:50:25,955 - MainThread - DuetLapse3 Version --- 5.3.5
2023-12-20 15:50:25,956 - MainThread - Requires Duet3d Version --- 3.5.0-rc.1
2023-12-20 15:50:25,956 - MainThread - Process Id --- 9084
2023-12-20 15:50:25,956 - MainThread - -------------------------------------------------------------------------------2023-12-20 15:50:25,957 - MainThread - seconds has been changed to 30
2023-12-20 15:50:25,958 - MainThread - poll has been changed to 10
2023-12-20 15:50:25,959 - MainThread - dontwait has been changed to True
2023-12-20 15:50:25,960 - MainThread - ################### Options at start of this print job #####################
2023-12-20 15:50:25,961 - MainThread - # Simulate
2023-12-20 15:50:25,961 - MainThread - -simulate = off
2023-12-20 15:50:25,962 - MainThread - # Environment
2023-12-20 15:50:25,962 - MainThread - -duet = 10.0.1.126
2023-12-20 15:50:25,963 - MainThread - -password = reprap
2023-12-20 15:50:25,963 - MainThread - -basedir = /home/pi/DuetLapse
2023-12-20 15:50:25,963 - MainThread - -poll = 10
2023-12-20 15:50:25,964 - MainThread - -instances = single
2023-12-20 15:50:25,964 - MainThread - -logtype = both
2023-12-20 15:50:25,965 - MainThread - -nolog = False
2023-12-20 15:50:25,965 - MainThread - -verbose = True
2023-12-20 15:50:25,965 - MainThread - -host = 0.0.0.0
2023-12-20 15:50:25,966 - MainThread - -port = 8082
2023-12-20 15:50:25,966 - MainThread - -keeplogs = False
2023-12-20 15:50:25,966 - MainThread - -novideo = False
2023-12-20 15:50:25,967 - MainThread - -deletepics = False
2023-12-20 15:50:25,967 - MainThread - -maxffmpeg = 2
2023-12-20 15:50:25,968 - MainThread - -keepfiles = False
2023-12-20 15:50:25,968 - MainThread - # Execution
2023-12-20 15:50:25,968 - MainThread - -dontwait = True
2023-12-20 15:50:25,979 - MainThread - -seconds = 30
2023-12-20 15:50:25,980 - MainThread - -detect = none
2023-12-20 15:50:25,980 - MainThread - -pause = no
2023-12-20 15:50:25,981 - MainThread - -numlayers = 1
2023-12-20 15:50:25,981 - MainThread - -movehead = [0, 0]
2023-12-20 15:50:25,982 - MainThread - -rest = 1
2023-12-20 15:50:25,982 - MainThread - -standby = False
2023-12-20 15:50:25,983 - MainThread - -restart = False
2023-12-20 15:50:25,983 - MainThread - # Camera
2023-12-20 15:50:25,984 - MainThread - -camera1 = stream
2023-12-20 15:50:25,984 - MainThread - -camera2
2023-12-20 15:50:25,985 - MainThread - -weburl1 = http://localhost:8081/stream
2023-12-20 15:50:25,985 - MainThread - -weburl2
2023-12-20 15:50:25,985 - MainThread - # Video
2023-12-20 15:50:25,986 - MainThread - -extratime = 0
2023-12-20 15:50:25,986 - MainThread - -fps = 10
2023-12-20 15:50:25,986 - MainThread - -minvideo = 5
2023-12-20 15:50:25,987 - MainThread - -maxvideo = 0
2023-12-20 15:50:25,987 - MainThread - # Overrides
2023-12-20 15:50:25,987 - MainThread - -camparam1
2023-12-20 15:50:25,988 - MainThread - -camparam2
2023-12-20 15:50:25,988 - MainThread - -vidparam1
2023-12-20 15:50:25,990 - MainThread - -vidparam2
2023-12-20 15:50:25,991 - MainThread - # UI
2023-12-20 15:50:25,991 - MainThread - -hidebuttons = False
2023-12-20 15:50:25,992 - MainThread - # Special Functions
2023-12-20 15:50:25,993 - MainThread - -execkey
2023-12-20 15:50:25,994 - MainThread - -M3291 = M3291
2023-12-20 15:50:25,994 - MainThread - -----------------------------------------------------------------------2023-12-20 15:50:25,995 - MainThread - ************************************************************************************
2023-12-20 15:50:25,995 - MainThread - Warning: -seconds 30 and -detect none
2023-12-20 15:50:25,996 - MainThread - This combination implies -dontwait and will be set automatically
2023-12-20 15:50:25,996 - MainThread - ************************************************************************************2023-12-20 15:50:25,997 - MainThread - ##########################################################
2023-12-20 15:50:25,998 - MainThread - Will start capturing images immediately
2023-12-20 15:50:25,998 - MainThread - ##########################################################2023-12-20 15:50:25,999 - MainThread - ##########################################################
2023-12-20 15:50:26,000 - MainThread - Video will be created when printing ends
2023-12-20 15:50:26,001 - MainThread - or if requested from the UI or M3291 P"DuetLapse3.completed"
2023-12-20 15:50:26,002 - MainThread - ##########################################################2023-12-20 15:50:26,003 - MainThread - ##########################################################
2023-12-20 15:50:26,004 - MainThread - If running from a console using the command line
2023-12-20 15:50:26,005 - MainThread - Press Ctrl+C one time to stop the program and create a video.
2023-12-20 15:50:26,006 - MainThread - ##########################################################2023-12-20 15:50:26,009 - MainThread - ***** Initializing state and counters *****
2023-12-20 15:50:26,018 - MainThread - ##########################################################
2023-12-20 15:50:26,020 - MainThread - ***** Started http listener on port 8082*****
2023-12-20 15:50:26,022 - MainThread - ##########################################################2023-12-20 15:50:26,023 - MainThread - Logging in to Printer
2023-12-20 15:50:26,025 - MainThread - 0 url: http://10.0.1.126/rr_disconnect post: False
2023-12-20 15:50:26,120 - MainThread - 0 url: http://10.0.1.126/rr_connect?password=reprap post: False
2023-12-20 15:50:26,164 - MainThread - !!!!! Connected to printer Standalone !!!!!
2023-12-20 15:50:26,166 - MainThread - !!!!! Checking for firmware version 3.5.0-rc.1 !!!!!
2023-12-20 15:50:26,169 - MainThread - 0 url: http://10.0.1.126/rr_model?key=boards post: False
2023-12-20 15:50:26,211 - MainThread - Version Check returned --> 3.5.0-rc.1+102
2023-12-20 15:50:26,216 - MainThread - ###############################################################
2023-12-20 15:50:26,217 - MainThread - Connected to printer at 10.0.1.126
2023-12-20 15:50:26,218 - MainThread - Using Duet version 3.5.0-rc.1+102
2023-12-20 15:50:26,219 - MainThread - Using API interface rr_model
2023-12-20 15:50:26,220 - MainThread - ###############################################################2023-12-20 15:50:26,221 - MainThread - isPlugin ignored - only valid for SBC
2023-12-20 15:50:26,222 - MainThread - Initializing DL3msg queue
2023-12-20 15:50:26,222 - MainThread - 0 url: http://10.0.1.126/rr_gcode?gcode=M3291 B"Clear" post: False
2023-12-20 15:50:26,365 - mainLoop - ###########################
2023-12-20 15:50:26,367 - mainLoop - Starting mainLoop
2023-12-20 15:50:26,368 - mainLoop - ###########################2023-12-20 15:50:26,368 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:50:26,369 - MainThread - Initiating with action set to start
2023-12-20 15:50:26,379 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:50:26,380 - MainThread - Calling nextaction start from main --> startup --> nextAction
2023-12-20 15:50:26,393 - MainThread - ++++++ start state requested ++++++
2023-12-20 15:50:26,397 - MainThread - nextAction requested stopCaptureLoop
2023-12-20 15:50:26,398 - MainThread - captureLoop is not running
2023-12-20 15:50:26,399 - MainThread - nextAction satisfied waitforCaptureLoop
2023-12-20 15:50:26,400 - MainThread - ++++++ Determining next logical action ++++++
2023-12-20 15:50:26,401 - MainThread - ++++++ Entering start state ++++++
2023-12-20 15:50:26,401 - MainThread - nextAction exiting normally
2023-12-20 15:50:26,451 - mainLoop - Standalone Status is processing
2023-12-20 15:50:26,452 - mainLoop - Error Processing message queue
2023-12-20 15:50:26,452 - mainLoop - 'global'
2023-12-20 15:50:29,336 - Thread-1 - !!!!! http call: {'displayStatus': ['true']} !!!!!
2023-12-20 15:50:31,459 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:50:31,461 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:50:31,689 - mainLoop - Standalone Status is processing
2023-12-20 15:50:31,690 - mainLoop - Error Processing message queue
2023-12-20 15:50:31,690 - mainLoop - 'global'
2023-12-20 15:50:36,696 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:50:36,703 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:50:36,812 - mainLoop - Standalone Status is processing
2023-12-20 15:50:36,813 - mainLoop - Error Processing message queue
2023-12-20 15:50:36,815 - mainLoop - 'global'
2023-12-20 15:50:36,816 - mainLoop - ****** Duet status changed to: processing from unknown *****
2023-12-20 15:50:36,818 - mainLoop - ****** stateMachine:
2023-12-20 15:50:36,820 - mainLoop - newstate = Capturing
2023-12-20 15:50:36,823 - mainLoop - currentState = Waiting
2023-12-20 15:50:36,826 - mainLoop - duetStatus = processing
2023-12-20 15:50:36,828 - mainLoop - lastDuetStatus = unknown
2023-12-20 15:50:36,829 - mainLoop - dontwait = True
2023-12-20 15:50:36,830 - mainLoop - detect = none
2023-12-20 15:50:36,835 - mainLoop - terminateState = -1
2023-12-20 15:50:36,837 - mainLoop - ******
2023-12-20 15:50:36,839 - mainLoop - ****** Print State changed to: Capturing from Waiting*****
2023-12-20 15:50:36,841 - mainLoop - Calling oneInterval for Camera 1
2023-12-20 15:50:36,843 - mainLoop - Calling Layer from captureLoop --> oneInterval --> getDuet
2023-12-20 15:50:36,845 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=job.layer post: False
2023-12-20 15:50:36,927 - mainLoop - Current Layer is 124
2023-12-20 15:50:36,929 - mainLoop - elapsed: 10.918282985687256
2023-12-20 15:50:36,932 - mainLoop - ****** stateMachine:
2023-12-20 15:50:36,934 - mainLoop - newstate = Capturing
2023-12-20 15:50:36,937 - mainLoop - currentState = Capturing
2023-12-20 15:50:36,944 - mainLoop - duetStatus = processing
2023-12-20 15:50:36,946 - mainLoop - lastDuetStatus = unknown
2023-12-20 15:50:36,948 - mainLoop - dontwait = True
2023-12-20 15:50:36,949 - mainLoop - detect = none
2023-12-20 15:50:36,951 - mainLoop - terminateState = -1
2023-12-20 15:50:36,952 - mainLoop - ******
2023-12-20 15:50:39,334 - Thread-2 - !!!!! http call: {'displayStatus': ['true']} !!!!!
2023-12-20 15:50:41,959 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:50:41,960 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:50:42,060 - mainLoop - Standalone Status is processing
2023-12-20 15:50:42,061 - mainLoop - Error Processing message queue
2023-12-20 15:50:42,062 - mainLoop - 'global'
2023-12-20 15:50:47,069 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:50:47,070 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:50:47,131 - mainLoop - Standalone Status is processing
2023-12-20 15:50:47,132 - mainLoop - Error Processing message queue
2023-12-20 15:50:47,134 - mainLoop - 'global'
2023-12-20 15:50:47,136 - mainLoop - ****** stateMachine:
2023-12-20 15:50:47,137 - mainLoop - newstate = Capturing
2023-12-20 15:50:47,139 - mainLoop - currentState = Capturing
2023-12-20 15:50:47,140 - mainLoop - duetStatus = processing
2023-12-20 15:50:47,140 - mainLoop - lastDuetStatus = processing
2023-12-20 15:50:47,141 - mainLoop - dontwait = True
2023-12-20 15:50:47,142 - mainLoop - detect = none
2023-12-20 15:50:47,143 - mainLoop - terminateState = -1
2023-12-20 15:50:47,143 - mainLoop - ******
2023-12-20 15:50:47,146 - mainLoop - Calling oneInterval for Camera 1
2023-12-20 15:50:47,149 - mainLoop - Calling Layer from captureLoop --> oneInterval --> getDuet
2023-12-20 15:50:47,150 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=job.layer post: False
2023-12-20 15:50:47,206 - mainLoop - Current Layer is 124
2023-12-20 15:50:47,207 - mainLoop - elapsed: 21.196640968322754
2023-12-20 15:50:47,208 - mainLoop - ****** stateMachine:
2023-12-20 15:50:47,209 - mainLoop - newstate = Capturing
2023-12-20 15:50:47,209 - mainLoop - currentState = Capturing
2023-12-20 15:50:47,210 - mainLoop - duetStatus = processing
2023-12-20 15:50:47,210 - mainLoop - lastDuetStatus = processing
2023-12-20 15:50:47,214 - mainLoop - dontwait = True
2023-12-20 15:50:47,216 - mainLoop - detect = none
2023-12-20 15:50:47,218 - mainLoop - terminateState = -1
2023-12-20 15:50:47,219 - mainLoop - ******
2023-12-20 15:50:49,329 - Thread-3 - !!!!! http call: {'displayStatus': ['true']} !!!!!
2023-12-20 15:50:52,226 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:50:52,228 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:50:52,396 - mainLoop - Standalone Status is processing
2023-12-20 15:50:52,397 - mainLoop - Error Processing message queue
2023-12-20 15:50:52,397 - mainLoop - 'global'
2023-12-20 15:50:57,403 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 15:50:57,405 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:50:57,521 - mainLoop - Standalone Status is processing
2023-12-20 15:50:57,527 - mainLoop - Error Processing message queue
2023-12-20 15:50:57,528 - mainLoop - 'global'
2023-12-20 15:50:57,531 - mainLoop - ****** stateMachine:
2023-12-20 15:50:57,532 - mainLoop - newstate = Capturing
2023-12-20 15:50:57,533 - mainLoop - currentState = Capturing
2023-12-20 15:50:57,534 - mainLoop - duetStatus = processing
2023-12-20 15:50:57,534 - mainLoop - lastDuetStatus = processing
2023-12-20 15:50:57,559 - mainLoop - dontwait = True
2023-12-20 15:50:57,560 - mainLoop - detect = none
2023-12-20 15:50:57,560 - mainLoop - terminateState = -1
2023-12-20 15:50:57,561 - mainLoop - ******
2023-12-20 15:50:57,562 - mainLoop - Calling oneInterval for Camera 1
2023-12-20 15:50:57,563 - mainLoop - Calling Layer from captureLoop --> oneInterval --> getDuet
2023-12-20 15:50:57,564 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=job.layer post: False
2023-12-20 15:50:57,613 - mainLoop - Current Layer is 125
2023-12-20 15:50:57,616 - mainLoop - elapsed: 31.605782985687256
2023-12-20 15:50:57,621 - mainLoop - Calling Status from oneInterval --> checkForPause --> getDuet
2023-12-20 15:50:57,623 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 15:50:57,681 - mainLoop - Standalone Status is processing
2023-12-20 15:50:57,682 - mainLoop - Error Processing message queue
2023-12-20 15:50:57,684 - mainLoop - 'global'
2023-12-20 15:50:57,686 - mainLoop - Time - Camera1: capturing frame 1 at layer 125 after 30 seconds
2023-12-20 15:50:57,689 - mainLoop - Calling stack oneInterval --> onePhoto --> createworkingDir
2023-12-20 15:50:57,692 - mainLoop - Created working directory: /home/pi/DuetLapse/raspberrypi/10-0-1-126/9084_1
2023-12-20 15:50:57,696 - mainLoop - Calling stack onePhoto --> createworkingDir --> renamelogfile
2023-12-20 15:50:57,705 - mainLoop - Calling Jobname from onePhoto --> renameworkingDir --> getDuet
2023-12-20 15:50:57,709 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=job.file.fileName post: False
2023-12-20 15:50:57,768 - mainLoop - Renaming working directory: /home/pi/DuetLapse/raspberrypi/10-0-1-126/9084_1_Body1
2023-12-20 15:50:57,770 - mainLoop - Calling stack onePhoto --> renameworkingDir --> renamelogfile
2023-12-20 15:50:59,336 - Thread-4 - !!!!! http call: {'displayStatus': ['true']} !!!!!
2023-12-20 15:51:00,941 - mainLoop - Command Failure: ffmpeg -threads 1 -y -i http://localhost:8081/stream -vframes 1 -threads 1 /home/pi/DuetLapse/raspberrypi/10-0-1-126/9084_1_Body1/Camera1_00000001.jpeg
2023-12-20 15:51:00,944 - mainLoop - Error = ffmpeg version 4.3.6-0+deb11u1+rpt5 Copyright (c) 2000-2023 the FFmpeg developers
built with gcc 10 (Raspbian 10.2.1-6+rpi1)
configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d -- -
hi here are some updates
1-i fixed the issue with the localhost and ip so now we are back to this config am using a ribbon pi cam
-basedir /home/pi/DuetLapse
-duet 10.0.1.126
-port 8082
-seconds 30
-detect none
-weburl1 http://10.0.1.110/stream
-verbose
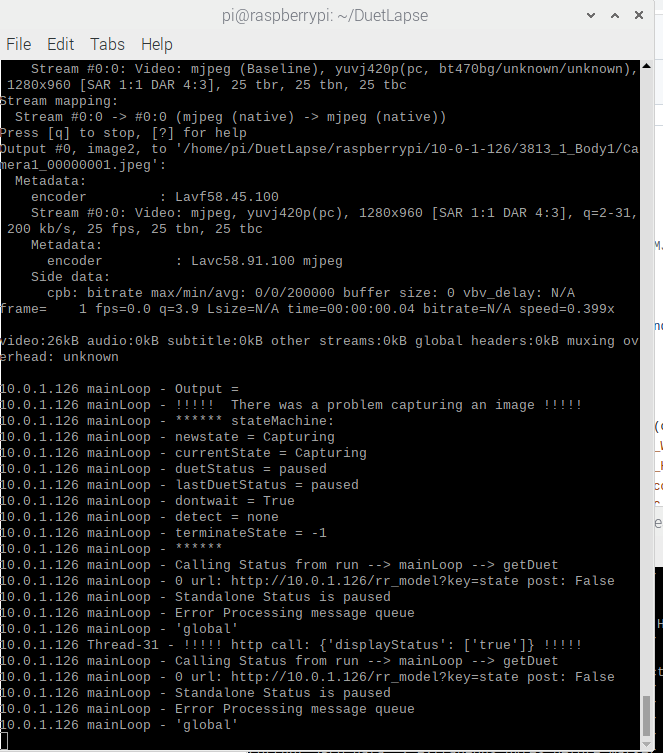
-camera1 streamwhile printing here is the log
2023-12-20 17:06:00,452 - mainLoop - Output =
2023-12-20 17:06:00,454 - mainLoop - !!!!! There was a problem capturing an image !!!!!
2023-12-20 17:06:00,455 - mainLoop - ****** stateMachine:
2023-12-20 17:06:00,456 - mainLoop - newstate = Capturing
2023-12-20 17:06:00,456 - mainLoop - currentState = Capturing
2023-12-20 17:06:00,457 - mainLoop - duetStatus = processing
2023-12-20 17:06:00,457 - mainLoop - lastDuetStatus = processing
2023-12-20 17:06:00,458 - mainLoop - dontwait = True
2023-12-20 17:06:00,458 - mainLoop - detect = none
2023-12-20 17:06:00,458 - mainLoop - terminateState = -1
2023-12-20 17:06:00,459 - mainLoop - ******
2023-12-20 17:06:03,802 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 17:06:03,819 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 17:06:03,861 - mainLoop - Standalone Status is processing
2023-12-20 17:06:03,864 - mainLoop - Error Processing message queue
2023-12-20 17:06:03,866 - mainLoop - 'global'
2023-12-20 17:06:08,878 - mainLoop - Calling Status from run --> mainLoop --> getDuet
2023-12-20 17:06:08,879 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 17:06:09,063 - mainLoop - Standalone Status is processing
2023-12-20 17:06:09,064 - mainLoop - Error Processing message queue
2023-12-20 17:06:09,064 - mainLoop - 'global'
2023-12-20 17:06:10,734 - mainLoop - ****** stateMachine:
2023-12-20 17:06:10,735 - mainLoop - newstate = Capturing
2023-12-20 17:06:10,735 - mainLoop - currentState = Capturing
2023-12-20 17:06:10,736 - mainLoop - duetStatus = processing
2023-12-20 17:06:10,736 - mainLoop - lastDuetStatus = processing
2023-12-20 17:06:10,737 - mainLoop - dontwait = True
2023-12-20 17:06:10,737 - mainLoop - detect = none
2023-12-20 17:06:10,738 - mainLoop - terminateState = -1
2023-12-20 17:06:10,738 - mainLoop - ******
2023-12-20 17:06:10,738 - mainLoop - Calling oneInterval for Camera 1
2023-12-20 17:06:10,739 - mainLoop - Calling Layer from captureLoop --> oneInterval --> getDuet
2023-12-20 17:06:10,739 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=job.layer post: False
2023-12-20 17:06:10,844 - mainLoop - Current Layer is 1
2023-12-20 17:06:10,845 - mainLoop - elapsed: 403.8418319225311
2023-12-20 17:06:10,846 - mainLoop - Calling Status from oneInterval --> checkForPause --> getDuet
2023-12-20 17:06:10,846 - mainLoop - 0 url: http://10.0.1.126/rr_model?key=state post: False
2023-12-20 17:06:10,876 - mainLoop - Standalone Status is processing
2023-12-20 17:06:10,877 - mainLoop - Error Processing message queue
2023-12-20 17:06:10,878 - mainLoop - 'global'
2023-12-20 17:06:10,879 - mainLoop - Time - Camera1: capturing frame 1 at layer 1 after 30 seconds
2023-12-20 17:06:12,984 - mainLoop - Command Failure: ffmpeg -threads 1 -y -i http://10.0.1.110/stream -vframes 1 -threads 1 /home/pi/DuetLapse/raspberrypi/10-0-1-126/1739_1_Body1/Camera1_00000001.jpeg
2023-12-20 17:06:12,986 - mainLoop - Error = ffmpeg version 4.3.6-0+deb11u1+rpt5 Copyright (c) 2000-2023 the FFmpeg developers
built with gcc 10 (Raspbian 10.2.1-6+rpi1)
configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --enable-shared --libdir=/usr/lib/arm-linux-gnueabihf --cpu=arm1176jzf-s --arch=arm
WARNING: library configuration mismatch
avutil configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
avcodec configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
avformat configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
avdevice configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
avfilter configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
avresample configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
swscale configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
swresample configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
postproc configuration: --prefix=/usr --extra-version=0+deb11u1+rpt5 --toolchain=hardened --incdir=/usr/include/arm-linux-gnueabihf --enable-gpl --disable-stripping --enable-avresample --disable-filter=resample --enable-gnutls --enable-ladspa --enable-libaom --enable-libass --enable-libbluray --enable-libbs2b --enable-libcaca --enable-libcdio --enable-libcodec2 --enable-libdav1d --enable-libflite --enable-libfontconfig --enable-libfreetype --enable-libfribidi --enable-libgme --enable-libgsm --enable-libjack --enable-libmp3lame --enable-libmysofa --enable-libopenjpeg --enable-libopenmpt --enable-libopus --enable-libpulse --enable-librabbitmq --enable-librsvg --enable-librubberband --enable-libshine --enable-libsnappy --enable-libsoxr --enable-libspeex --enable-libsrt --enable-libssh --enable-libtheora --enable-libtwolame --enable-libvidstab --enable-libvorbis --enable-libvpx --enable-libwavpack --enable-libwebp --enable-libx265 --enable-libxml2 --enable-libxvid --enable-libzmq --enable-libzvbi --enable-lv2 --enable-omx --enable-openal --enable-opencl --enable-opengl --enable-sdl2 --enable-mmal --enable-neon --enable-rpi --enable-v4l2-request --enable-libudev --enable-epoxy --enable-pocketsphinx --enable-libdc1394 --enable-libdrm --enable-vout-drm --enable-libiec61883 --enable-chromaprint --enable-frei0r --enable-libx264 --libdir=/usr/lib/arm-linux-gnueabihf/neon/vfp --cpu=cortex-a7 --arch=armv6t2 --disable-thumb --enable-shared --disable-doc --disable-programs
libavutil 56. 51.100 / 56. 51.100
libavcodec 58. 91.100 / 58. 91.100
libavformat 58. 45.100 / 58. 45.100
libavdevice 58. 10.100 / 58. 10.100
libavfilter 7. 85.100 / 7. 85.100
libavresample 4. 0. 0 / 4. 0. 0
libswscale 5. 7.100 / 5. 7.100
libswresample 3. 7.100 / 3. 7.100
libpostproc 55. 7.100 / 55. 7.100
Input #0, mpjpeg, from 'http://10.0.1.110/stream':
Duration: N/A, bitrate: N/A
Stream #0:0: Video: mjpeg (Baseline), yuvj420p(pc, bt470bg/unknown/unknown), 1280x720 [SAR 1:1 DAR 16:9], 25 tbr, 25 tbn, 25 tbc
Stream mapping:
Stream #0:0 -> #0:0 (mjpeg (native) -> mjpeg (native))
Press [q] to stop, [?] for help
Output #0, image2, to '/home/pi/DuetLapse/raspberrypi/10-0-1-126/1739_1_Body1/Camera1_00000001.jpeg':
Metadata:
encoder : Lavf58.45.100
Stream #0:0: Video: mjpeg, yuvj420p(pc), 1280x720 [SAR 1:1 DAR 16:9], q=2-31, 200 kb/s, 25 fps, 25 tbn, 25 tbc
Metadata:
encoder : Lavc58.91.100 mjpeg
Side data:
cpb: bitrate max/min/avg: 0/0/200000 buffer size: 0 vbv_delay: N/A
frame= 1 fps=0.0 q=5.2 Lsize=N/A time=00:00:00.04 bitrate=N/A speed=0.422x
video:20kB audio:0kB subtitle:0kB other streams:0kB global headers:0kB muxing overhead: unknown2023-12-20 17:06:12,988 - mainLoop - Output =
2023-12-20 17:06:12,989 - mainLoop - !!!!! There was a problem capturing an image !!!!!
2023-12-20 17:06:12,991 - mainLoop - ****** stateMachine: -
It looks very much like ffmpeg is unhappy with your video stream. Unfortunately ffmpeg output (despite being very long) is light on clues.
Can you confirm that, from a browser (not on the pi), that this url results in the display of video ?
http://10.0.1.110/streamWhat streaming software are you using? Does it generate any error messages ?
Are any images being created like: /home/pi/DuetLapse/raspberrypi/10-0-1-126/<>/Camera1_00000001.jpeg
if so - what happens when you try to open one ?
Assuming you are streaming video OK ...
Lets try getting ffmpeg to work without DuetLapse. Make sure you are streaming. From your home directory run
ffmpeg -y -i http://10.0.1.110/stream -vframes 1 ~/test.jpegYou should get errors the same as above. Do you ? If yes - try reinstalling ffmpeg. Its possible there are some library dependency conflicts.
-
I don't know about that board in SBC.mode, maybe @jay_s_uk knows more?
-
That board works in SBC mode and should be no different to duet boards in SBC mode.
I believe at the moment, the board is being ran in standalone mode -
yes its running on standalone not sbc
-
let me do point by point
Can you confirm that, from a browser (not on the pi), that this url results in the display of video ?
http://10.0.1.110/streamyes
What streaming software are you using? Does it generate any error messages ?
answer :motion ver 4.3.2
Are any images being created like: /home/pi/DuetLapse/raspberrypi/10-0-1-126/<>/Camera1_00000001.jpeg
answer :yes 1 image
answer : on the duetlapse also says 1 image
if so - what happens when you try to open one ?
answer : it open no issues an image of the camera from the room am in it
Assuming you are streaming video OK ...
it is ok
ffmpeg -y -i http://10.0.1.110/stream -vframes 1 ~/test.jpeg
it takes a pic and save it under home 1 pic yes
ou should get errors the same as above. Do you ? If yes - try reinstalling ffmpeg. Its possible there are some library dependency conflicts.
answer : yes i get the same as above while running it looks like something with the config of the ffmpeg maybe it need only to be disabled
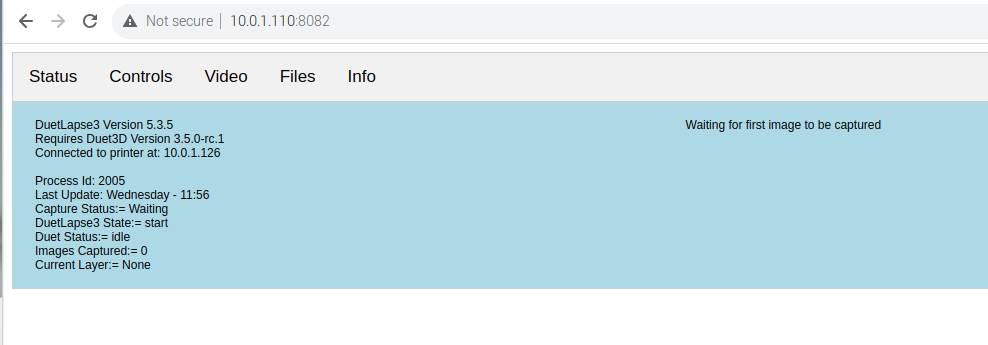
question : is the 10.0.1.110:8082 suppose to show an image when it takes one? i mean the first page is it suppose to show the live pic ?
why is it only taking one pic only while printing it suppose to take 1 every 20 sec no ?
see below

45 layres and only 1 pic
-
i mean the first page is it suppose to show the live pic ?
No - it displays the last still image it has capture. In this case - it has not captured any images.
Do you have motion set to stream ? I.e. when viewing in a browser does http://10.0.1.110/stream show live video (as opposed to a single static image)?
What is happening is ffmpeg is not able to capture from the motion feed. So either a problem with ffmpeg or motion or both

Assuming that the motion feed is video. What happens when you run
ffmpeg -y -i http://10.0.1.110/stream -vframes 1 ~/tes[x].jpeg(changing [x] to get different images).Note that the command above is subtly different to the one used in DuetLapse - which may not be supported by the ffmpeg version on your machine (although its supposed to be). But one step at a time ...
-
hi here is the answers
Do you have motion set to stream ? I.e. when viewing in a browser does http://10.0.1.110/stream show live video (as opposed to a single static image)?
answer : yes live video
Assuming that the motion feed is video. What happens when you run ffmpeg -y -i http://10.0.1.110/stream -vframes 1 ~/tes[x].jpeg (changing [x] to get different images).
answer :it take a pic and i can open that pic and i change the name to anotherone in the link and redo it and it save another pic
Note that the command above is subtly different to the one used in DuetLapse - which may not be supported by the ffmpeg version on your machine (although its supposed to be). But one step at a time ...
answer : yes it works the same as you gave me it save a picture every time i do it
my config now is
-basedir /home/pi/DuetLapse
-duet 10.0.1.126
-port 8082
-seconds 30
-detect none
-weburl1 http://10.0.1.110/stream
-verbose
-camera1 streammaybe that camera1 stream is wrong ?
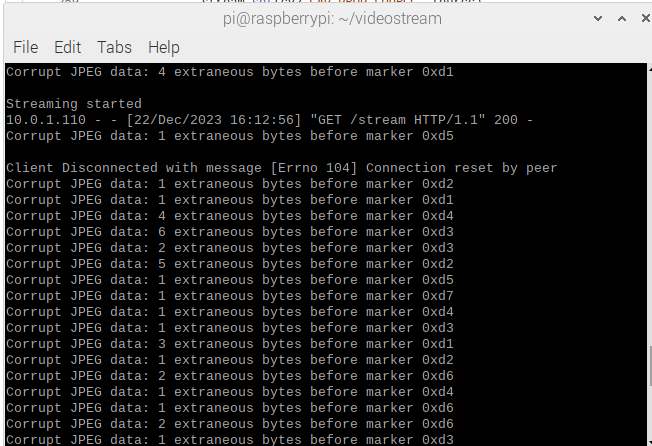
it seem the motion is saving video files see below the motion log
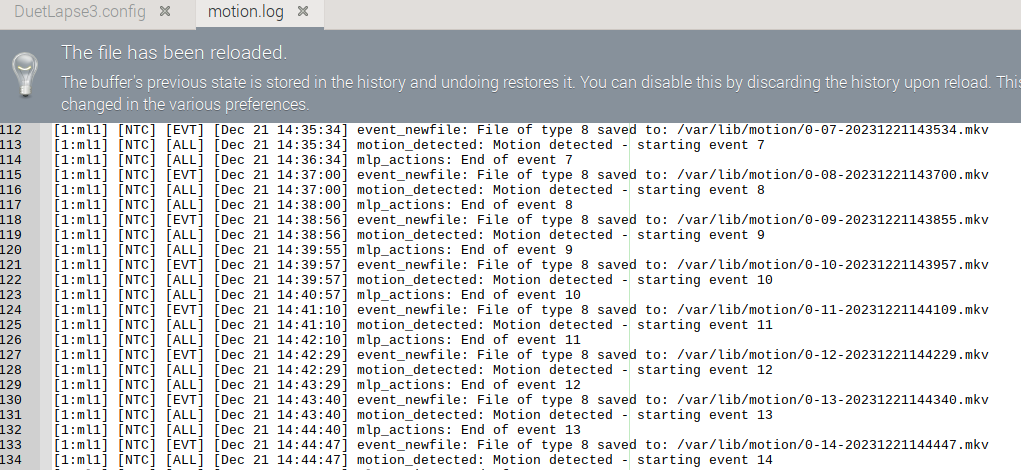
and maybe the format of the streaming need to be changed to mjpeg so the Duetlapse can see it but what i need to do to make this happen in motion ? But that is the job of ffmpeg no??
another note i find opne image always under 10-0-1-126 which is camera1_0-000001.jpg if i delete it it takes another pic with the same name but only one pic same name is this normal ? what is the output looks like a clip with still images or images to be a clip in another program ?
-
There should be sequentially named images in the "capture" folder. The fact that there is only one is a symptom of the problem.
Try this version. Its a long shot but I have removed a portion of the ffmpeg command so that it is the same as the one I had you manually test. If that does not change anything, then I think the issue is with motion.
Ideally - you want motion to be configured to output jpeg or mjpeg. I do not know what it streams by default. Also - I would disable the motion detection (just to take a variable out of play).
I used motion a long time ago but the version at that time used way too much CPU - so I developed videostream. That has the disadvantage of using opencv which can be tricky to get installed. Bottom line, I cannot help you directly with motion. -
so let us do videostream then but you know there is a part fails what i need to to ?? do you have a solution for that ? if less cpu then we do that but tell me what i need to do exact i will do it
i used the last ver you gave me it does the exact same thing one image same name the only difference in this one when the print cancel or stoped it does not force the duetlapse to stop it keep running idle
-
@sankafola said in issues installing on PI 3 B+:
so let us do videostream then but you know there is a part fails what i need to to ?? do you have a solution for that ? if less cpu then we do that but tell me what i need to do exact i will do it
If you are using a pi camera (ribon cable) then videostream can be used without opencv (which I mentioned can be reluctant to install). To use a USB camera requires opencv.
The version on github tries to import opencv. The version below has a small change and should not try to install opencv. To use this version you MUST use the -pires and -pistream options. This will use the pi libcamera libraries. I've not used it this way for quite a while so do not know if the libraries have changed much.
i used the last ver you gave me it does the exact same thing one image same name the only difference in this one when the print cancel or stoped it does not force the duetlapse to stop it keep running idle.
The difference is incidental - the change I made was just to the ffmeg call.
If videostream does not work, I have one other trick up my sleeve.
-
i made a dir called videostream and i put the file you sent videostream.py there and i ran python3 ./videostream.py -port8081 & -pires -pistream
and i got this error no module named imutilswhat i do ?
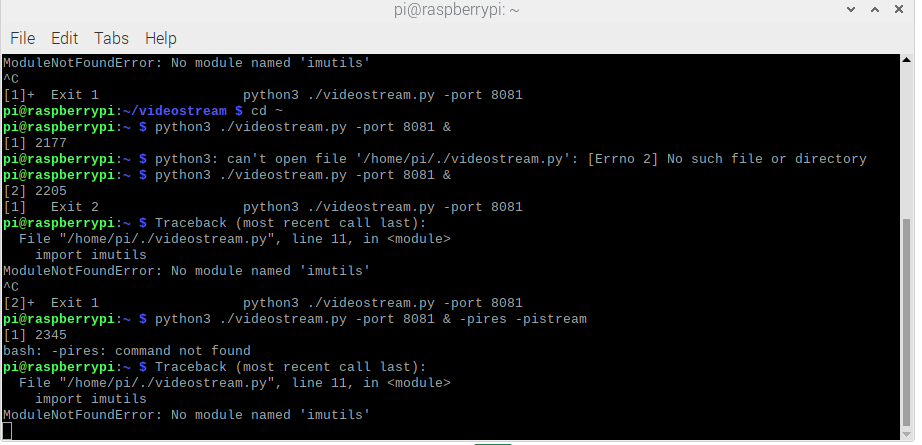
i installed imutils but now am getting another error for cv2
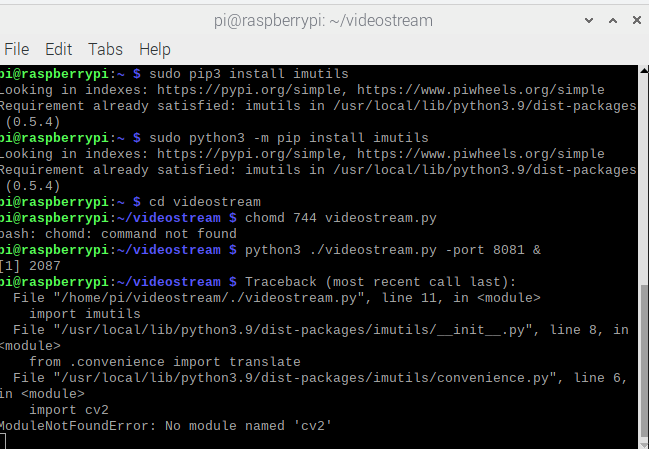
-
You tried to run videostream without -pires etc. so it tried to use opencv (cv2 is its internal name).
-
Also best to run without & at end when you are testing.
-
Also - please read the instructions especially on -pires settings and how to determine them.
-
i did try with and without the & and with the option -pires and -pistream and it gives the same results
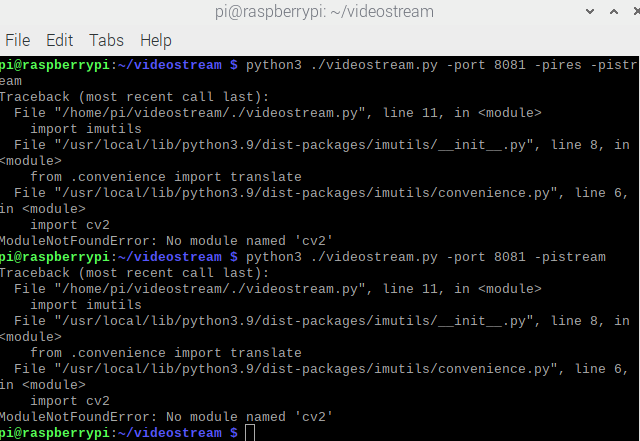 its asking for cv2 see below
its asking for cv2 see belowi will try to install the opencv i see now the notes you refered to it i will give it a try
a lot of errors see the log file down and as soon as i open the address 10.0.1.110:8081/stream i get this msg repeating " empty frame detected
pi@raspberrypi:~ $ python3 videostream.py -port 8081 &
[1] 2213
pi@raspberrypi:~ $ python3: can't open file '/home/pi/videostream.py': [Errno 2] No such file or directory
^C
[1]+ Exit 2 python3 videostream.py -port 8081
pi@raspberrypi:~ $ cd videostream
pi@raspberrypi:~/videostream $ python3 videostream.py -port 8081 &
[1] 2221
pi@raspberrypi:~/videostream $ Version: 2.1.1Scanning for available Cameras
[ WARN:0@0.777] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video1): can't open camera by index
[ERROR:0@0.792] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.792] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video2): can't open camera by index
[ERROR:0@0.796] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.796] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video3): can't open camera by index
[ERROR:0@0.799] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.800] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video4): can't open camera by index
[ERROR:0@0.803] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.803] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video5): can't open camera by index
[ERROR:0@0.807] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.807] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video6): can't open camera by index
[ERROR:0@0.811] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.811] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video7): can't open camera by index
[ERROR:0@0.816] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.817] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video8): can't open camera by index
[ERROR:0@0.821] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.821] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video9): can't open camera by index
[ERROR:0@0.825] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.825] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video10): can't open camera by index
[ERROR:0@0.829] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.829] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video11): can't open camera by index
[ERROR:0@0.833] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.833] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video12): can't open camera by index
[ERROR:0@0.836] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@0.837] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video13): can't open camera by index
[ERROR:0@0.840] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@10.862] global cap_v4l.cpp:1134 tryIoctl VIDEOIO(V4L2:/dev/video14): select() timeout.
[ WARN:0@20.888] global cap_v4l.cpp:1134 tryIoctl VIDEOIO(V4L2:/dev/video15): select() timeout.
[ WARN:0@20.892] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video16): can't open camera by index
[ERROR:0@20.900] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@20.901] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video17): can't open camera by index
[ERROR:0@20.910] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@20.910] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video18): can't open camera by index
[ERROR:0@20.919] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of range
[ WARN:0@20.919] global cap_v4l.cpp:997 open VIDEOIO(V4L2:/dev/video19): can't open camera by index
[ERROR:0@20.927] global obsensor_uvc_stream_channel.cpp:159 getStreamChannelGroup Camera index out of rangeNo camera was specified but one camera was found and will be used
Opening camera with identifier: 0
Scanning for available sizes and formats - be patient
The following resolutions are available from the camera: 2592x1944(BGR3) 2592x1944(MJPG) 2592x1944(JPEG) 2592x1944(H264) 2048x1080(BGR3) 2048x1080(MJPG) 2048x1080(JPEG) 2048x1080(H264) 1920x1800(BGR3) 1920x1800(MJPG) 1920x1800(JPEG) 1920x1800(H264) 1640x1232(BGR3) 1640x1232(MJPG) 1640x1232(JPEG) 1640x1232(H264) 1280x720(BGR3) 1280x720(MJPG) 1280x720(JPEG) 1280x720(H264) 800x600(BGR3) 800x600(MJPG) 800x600(JPEG) 800x600(H264) 720x480(BGR3) 720x480(MJPG) 720x480(JPEG) 720x480(H264) 640x480(BGR3) 640x480(MJPG) 640x480(JPEG) 640x480(H264) 320x240(BGR3) 320x240(MJPG) 320x240(JPEG) 320x240(H264)
The requested size was not available
Using a smaller size: 2592x1944
The requested format: MJPG is available
[ WARN:0@23.454] global cap_v4l.cpp:2183 setProperty VIDEOIO(V4L2:/dev/video0): Bad buffer size 0, buffer size must be from 1 to 10
[ WARN:0@34.068] global cap_v4l.cpp:1134 tryIoctl VIDEOIO(V4L2:/dev/video0): select() timeout.The video stream can be access from:
http://10.0.1.110:8081/streamIf on the same computer as the camera - you can also try the following:
localhost:8081/stream
127.0.0.1:8081/streamwhen i open the http://10.0.1.110:8081/stream i get this msg
i disconnected the ribbon camera and tried a USB camera now no more empty frame msg but other msg see below and only one image just like motion do ( am now with opencv and videostream )