Input Shaping - why (not effective on some parts at all)
-
@dc42 I'd say I'm confident that the 50Hz figure is +/- 3Hz correct.
I measured it on every face in every orientation, with 1 ripple (100mms/~2.1mm) and up to 5 ripples that I could spot and mark with confidence (500/9.8). So the truth should be somewhere between 47 and 52 Hz.
I also ran the ringing tower at 75mms, 50mms to confirm the ripples grow / shrink linearly with speed. Also ran it at 200mms but they're too washed out to confidently measure them.
The strangest part of it all is that the amplitude (and also the amount of the ripples) gets worse when I remove the weight of the direct drive extruder. Which, after thinking about it could mean that I could try to lower my belt tension instead of increasing it. 47Hz was the more in the upper range of Gates' recommended tension for a 700mm span and at the upper range of Moon's recommended bearing load.
-
@bberger I found input shaping a little frustrating with my delta so good luck! I tuned out my ringing (37 Hz +/- 5 Hz for me), then i get the lip at the corners which is worse to me than the ringing. The only variable to fix that was taking my jerk above 40 mm/s (M205) ... at which point i get my ringing back. To lower the ringing after that i had to increase the amplitude of the IS... and then it sounds scary as the motors are doing their IS work... so I decided to shelve tuning it for a bit until i figure out what mechanical bit will need help.
-
@lord-binky said in Input Shaping - why (not effective on some parts at all):
@bberger I found input shaping a little frustrating with my delta so good luck! I tuned out my ringing (37 Hz +/- 5 Hz for me), then i get the lip at the corners which is worse to me than the ringing. The only variable to fix that was taking my jerk above 40 mms^2... at which point i get my ringing back. To lower the ringing after that i had to increase the amplitude of the IS... and then it sounds scary as the motors are doing their IS work... so I decided to shelve tuning it for a bit until i figure out what mechanical bit will need help.
I'm sorry, but I don't quite follow.
40mm/s jerk is seriously low, how are you printing curves with such a low setting? If I go below 480mm/s^2 my printer almost falls apart on curves.
If you mean 40mm/s^2 acceleration though that's also scary low.
Not sure which setting you are actually referring to as the unit used makes it a bit confusing..
Also: what do you mean with "increase the amplitude of the input shaper"? Did you set custom input shaping impulses?
-
@dc42 just spotted this thread (https://forum.duet3d.com/topic/27855/input-shaping-pressure-advance-artifact) which pictures my ringing behavior after that small gap section better than I could.
Basically gone everywhere (90deg corners and the bulge on the right hand side), but still very, very prominent after that gap section:
Different printer and kinematics, similar effect.
-
@bberger I had meant 40 mm/s (M205-> max instantaneous speed change in mm/sec or 3000.0 using M566). I don't think that's a low jerk setting. As for the input shaping M593 Snnn (optional) Damping factor of ringing to be cancelled, default 0.1. The way I read that is increase/decrease this if you know you nailed your frequency but input shaping is too much/little.
-
@lord-binky yeah, my bad. For some reason my head was stick at "40mm/min".
To follow up on my Klipper experiment:
- that ringing artifact I have on RRF on the ringing test print is completely gone on Klipper - completely ringing-free from 1k-12k with the same shaper (MZV @ 53Hz on both axis).
- ADXL measurements confirm 53Hz shaper freq (52.8Hz on X, 53.8Hz on Y, so I just set it to 53Hz for both) at 0,0,20mm (X,Y,Z) with my flying Orbiter v2
- use of EI shaper is indistinguishable from MZV
- I measure very similar frequencies across the majority build volume (it's +1.5/-1.5) within a radius of 150mm, with the nozzle 20mm above the bed
- I get a second frequency at the extreme edges of the bed, near tower and opposite tower (I think it's the magballs disconnecting at those points due to extreme angles: 0,-175,20 and 0,+175,20). Graph reads like something is lose, vibrations all over. Only starts outside of 150mm radius though.
Extras:
- with RRF I had some strange extrusion problems on rectangular infill when using input shaper and PA where it left gaps on the perimeters and failed to connect the infill consistently. I had to go below 150mms and ~1.5k acceleration to make that go away. This is completely gone in Klipper. Perfectly connected rectangular infill even at 400mm/s@10k.
Maybe there's something to look into to improve RRF in that regard. I for one would absolutely love that. Duet Hardware is top notch and I actually like RRF. Would love ot see it improve here.
-
-
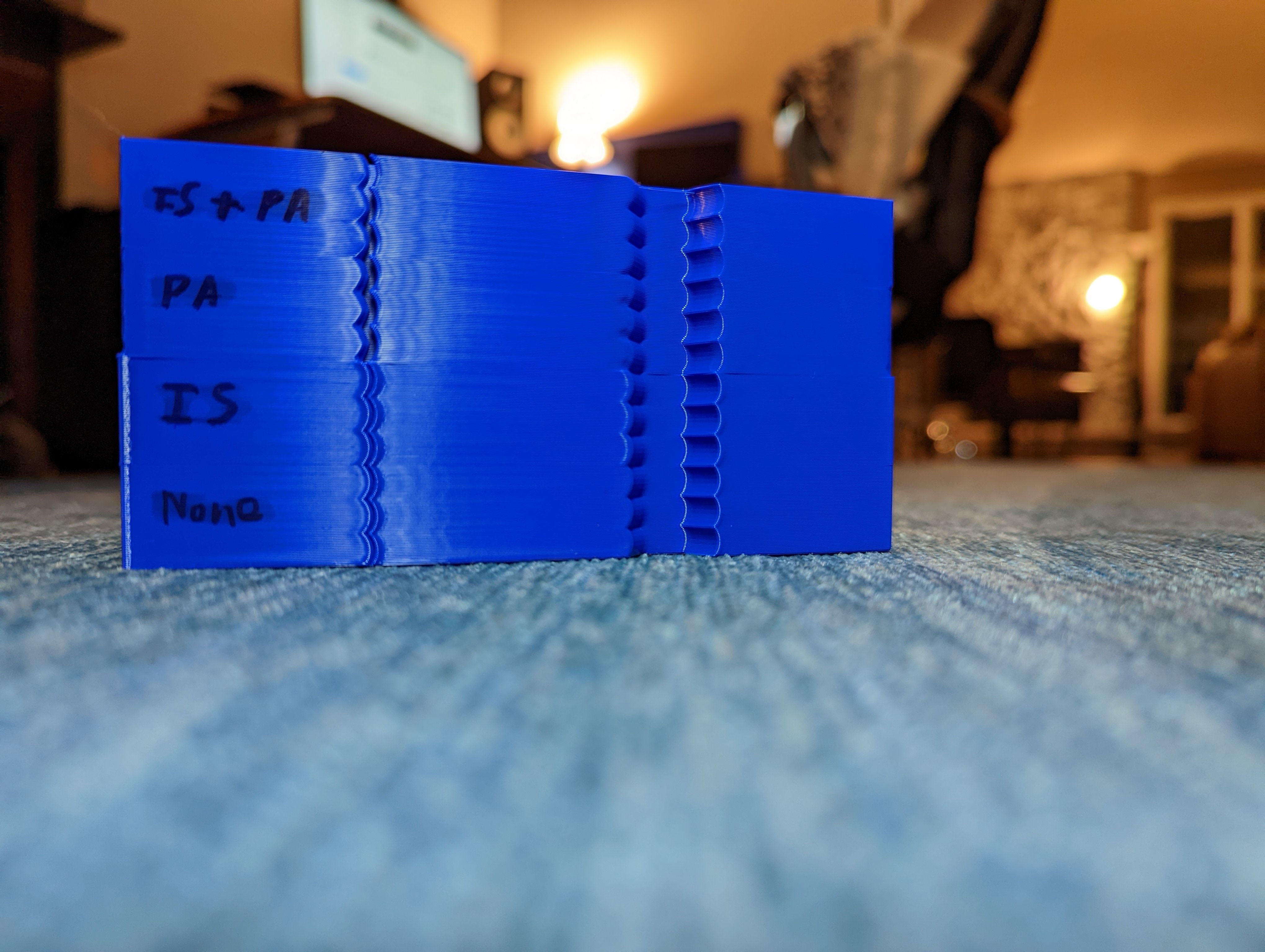
This is another case of IS + PA causing issues, and of IS application being somewhat inconsistent.
Any progress @dc42 on the IS implementation?
My biggest issue with it right now is with the lack of application on short segments. Most of my prints have radiused corners, so IS doesn't get applied at all. This is also the case for the start of a circular outer perimeter, since those are short segments as well.
Maybe a look ahead could help "stitch" the IS application together across multiple small segments?
-
Here is an example of how a circular perimeter is effected, even with IS enabled and working well for square corners / large segments:

-
@CCS86 said in Input Shaping - why (not effective on some parts at all):
My biggest issue with it right now is with the lack of application on short segments. Most of my prints have radiused corners, so IS doesn't get applied at all. This is also the case for the start of a circular outer perimeter, since those are short segments as well.
We are looking at how to handle IS on short segments - its on the work list.