hbot homes correctly but prints mirrored ,
-
i have set to this
M569 P5 S0 T5 R1 ; physical drive x goes forwards
M569 P6 S0 T5 R1 ; physical drive y goes forwardsthe
G91
G1 S2 X10 F3000they both move towards the back left corner (where the endstops are )
so x moves in a negative and y in a positive -
@tracar said in hbot homes correctly but prints mirrored ,:
so x moves in a negative and y in a positive
If it moves towards +X and -Y, or towards -X and +Y, then either turn the power off and swap the X and Y motor connections, or use M584 in config.g to swap the X and Y motor drivers over.
So swap your X and Y motor plugs.
-
changed drives to :
M584 X6 Y5 Z7:8 E3 ; set drive mappingnow with
G91
G1 S2 X10 F3000x and y move to the negative. so heading x to 0 and y to 0
which is the front left side of the printer. -
@tracar said in hbot homes correctly but prints mirrored ,:
x and y move to the negative.
If it moves in the -X and -Y directions, change the S parameter to S1 in the M569 P0 command. Or in your case, flip the direction on your external stepper for the P0 driver, labeled as X.
Actually that might be wrong because you've now remapped which driver X is assigned to. You're now using driver 6? Flip that one.
-
; Drives
M569 P5 S0 T5 R1 ; physical drive y goes forwards
M569 P6 S1 T5 R1 ; physical drive x goes forwardsboth move in a positive , to the top right side of the printer
-
@tracar said in hbot homes correctly but prints mirrored ,:
both move in a positive , to the top right side of the printer
If the head moves diagonally in the +X and +Y directions, all is well.
Move on to the next direction move test.
When you have the X motor moving correctly, test the Y motor by sending from the console:
G91
G1 S2 Y10 F3000If the head moves diagonally in the +X and -Y directions, all is well. If it moves in the -X and +Y directions, change the S parameter in the M569 P1 command to S1.
Y+ meaning to the back
-
x pos
y neg
")
-
Alright, so now when you jog the print head normally, does +x go to the right and Y+ to the back?
Have you changed your homing files to move to Y positive?
-
jogging is correct
y homing needs to be reversed
-
There is also some positive move need to go minus , eg the back off the end stop move , or they will push into the back stop instead of backing off.
So like I said don't change invert all y moves. -
homeall works
homex ,and homey work
and......x y jog work in the right way -
So all you need to do now is set the Z offset ?
-
@peter247 said in hbot homes correctly but prints mirrored ,:
So all you need to do now is set the Z offset ?
z always worked right
-
So Zero mm is zero mm from the bed ?
Ender 5 plus linear rail and hemera powered by duet 2 wifi , CR10s pro v1 with bltouch mostly stock , BLV mgn Cube slowly being built powered by duet 3 mini 5+
-
all thats left to get back is the bltouch settings and independant z axis for bed leveling
-
@peter247 yes z0 is Zero
after it homes to z0 it backs off 5mm
-
So what is next to do bed.g / G32 ?
-
next is to get it to recognize it has a bltouch attached, as M280 P7 S10 :deploy bltouch does not work
-
@tracar said in hbot homes correctly but prints mirrored ,:
M280 P7 S10
If we're using RRF3 now, that should be P0 instead of P7.
There should be an M950 command in your config.g that create the servo 0 pin for the bltouch. That's where the zero comes from.
-
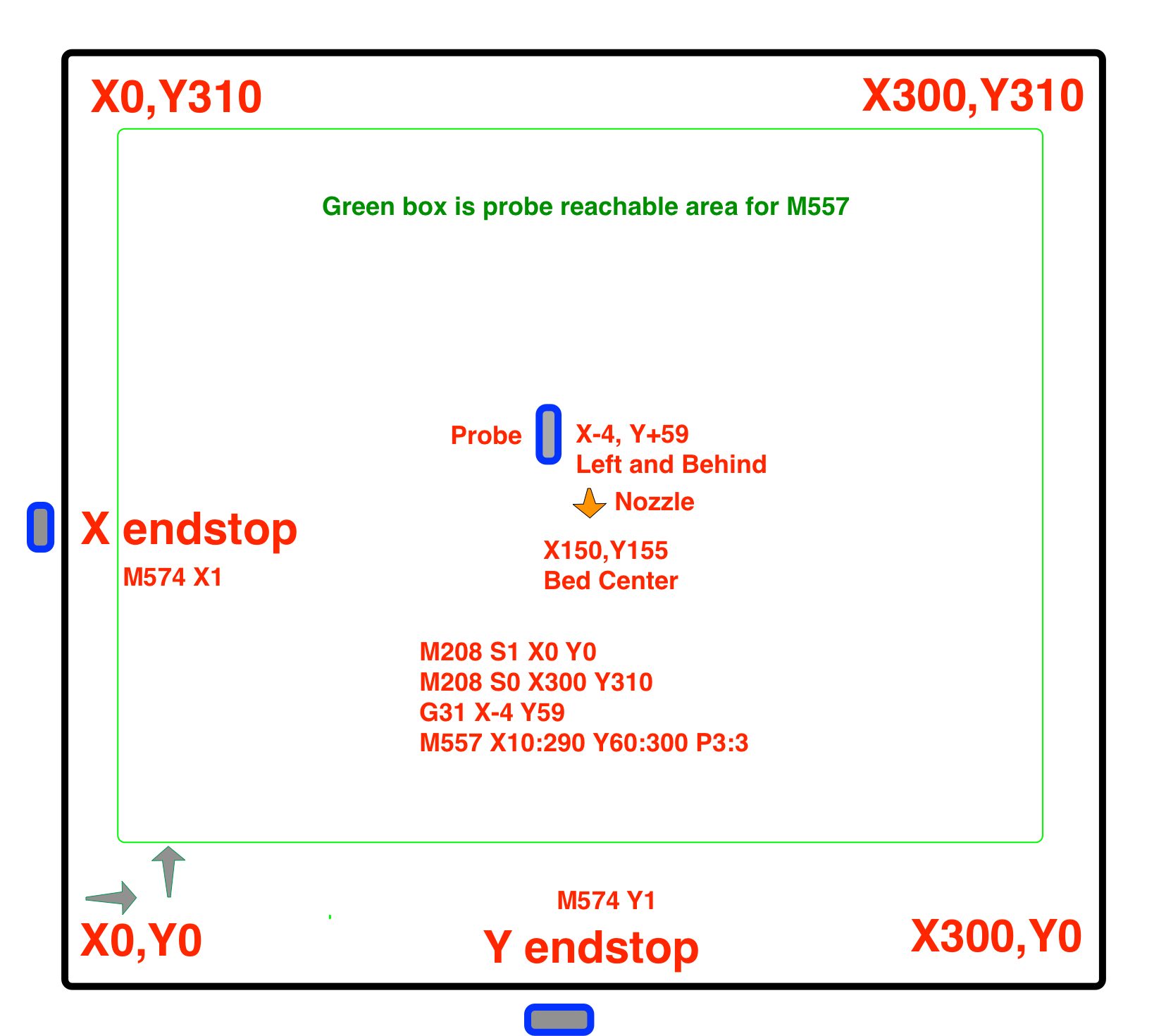
Doing up a diagram like this can be very helpful in getting the offsets all straight. Piece of grid paper works well if you're not a paint wiz.
There's also some useful info here:
https://duet3d.dozuki.com/Wiki/Test_and_calibrate_the_Z_probe
https://duet3d.dozuki.com/Wiki/Using_mesh_bed_compensation
https://duet3d.dozuki.com/Wiki/Bed_levelling_using_multiple_independent_Z_motorsThis page will also be useful for getting the hang of RRF3:
https://duet3d.dozuki.com/Wiki/RepRapFirmware_3_overviewAnd of course the Gcode wiki that will tell you how each gcode works:
https://duet3d.dozuki.com/Wiki/Gcode#main