External bearings for stepper shafts
-
@Nxt-1 Yes it would be a sizeable mechanical upgrade, but it would remove the tension, and you could even use different size pulleys to increase resolution.
From your photo it looked like you had quite a bit of space to work with. Alignment could be obtained in the same way the motor is currently mounted with a slot that gives you some wiggle room.
-
I have been bamboozled.
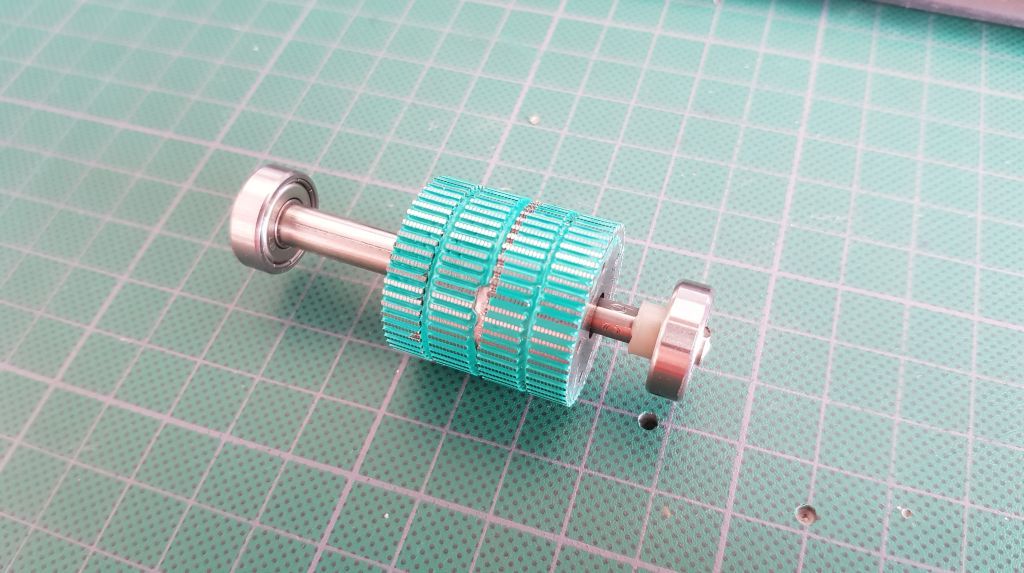
The last weeks I have been giving this idea some more thought. One of the solutions that came to mind was replacing the existing stepper shaft altogether for a longer version. I ordered some 5 mm diameter shafts and yesterday I opened one of the old nema 17 steppers to tryout this idea. Low and behold, the OD of the existing shaft is not 5 mm in all places. Where permanent magnet core sits over the shaft the OD is actually ~6,5 mm.
From what I have seen from other people taking apart steppers, this is not always the case. You never know before you open the steppers up though

-
there is another possible option and that is to use a dual shaft stepper and put a bearing on the rear shaft to take care of that side load.
-
@Nxt-1 you are aware that for some reason when you return the shaft back in to the casing your stepper will have 30-60% less torque compared to what it had before the operation? No clue why it happens, read it in some tech magazine ages ago, confirmed in practice few times
-
@Dougal1957 said in Flexible coupling or direct mount for delta?:
there is another possible option and that is to use a dual shaft stepper and put a bearing on the rear shaft to take care of that side load.
That is an interesting possibility indeed. The one issue that immediately comes to mind is availability. The choice is dual shaft steppers is quite a bit more restrictive.
-
@arhi said in Flexible coupling or direct mount for delta?:
@Nxt-1 you are aware that for some reason when you return the shaft back in to the casing your stepper will have 30-60% less torque compared to what it had before the operation? No clue why it happens, read it in some tech magazine ages ago, confirmed in practice few times
I did not know that. During I experiments with the shaft in the picture above, I did notice the core consists of four individual pieces that should really be placed on the new shaft in the exact same orientation, which probably is near to impossible. Apart from that, I can think of some more reasons as to why one would see a loss of torque but nothing that I can really support with experience nor evidence.
The gist of it is that I will not be going the shaft replacement route
")
-
@Nxt-1 Didn't say it would be easy but is a possibility OMC do do them but whether you can get them in the specs you want is something else LDO and MOONS are worth checking out as well. Pity Moons are so expensive else all mine would get swapped out
Doug
-
@Dougal1957 Thanks for the names of the suppliers, I'll check out what they have. Don't get me wrong, I do like the simplicity of the idea.
-
@Nxt-1 said in Flexible coupling or direct mount for delta?:
Where permanent magnet core sits over the shaft the OD is actually ~6,5 mm
FYI, Tech2C (the Hypercube designer) had this video about replacing stepper shafts https://www.youtube.com/watch?v=NmmFoBsSfEQ . The stepper he uses has consistent shaft diameter.
-
@Nxt-1 said in Flexible coupling or direct mount for delta?:
I did not know that. During I experiments with the shaft in the picture above, I did notice the core consists of four individual pieces that should really be placed on the new shaft in the exact same orientation, which probably is near to impossible. Apart from that, I can think of some more reasons as to why one would see a loss of torque but nothing that I can really support with experience nor evidence.
No clue what's the reason. To me it makes no sense, but I had to replace bearing on some steppers and all of them exibited exactly the described issue, when motor was reassembled it worked flawlesly but with less torque (around 50% less in my three instances). I did not reassemble shaft, just replaced bearings in the case.
One theory I heard is that if you allow core to touch the stator some magnetic $%#(&)^ happens and that's why you lose torque. I tried removing and returning the rotor in without stator touching the rotor at any point and by hand it's impossible for me, probbly some rig can be created but I gave up on "fixing/modifying" steppers as new ones with every possible mod already exist now and is accessible
-
-
@Danal said in Flexible coupling or direct mount for delta?:
@arhi said in Flexible coupling or direct mount for delta?:
magnetic $%#(&)^
Technical term?
I do electronics stuff good but I know ziltch about chemistry/mechanics of magnets and how different stuff affects them (apart from you heat the material, apply strong flux, let it cool and it becomes permanent magnet, you heat magnet, it loses the strength) so that's as tech as I can write about magnets
 ..
..anyhow one of the comments on the video where the guy replaces the shaft:
For anyone who is concerned with the loss of torque by disassembling their motors, don't be. This does NOT apply to the hybrid stepper motors that we use in our 3D printers.
Here's a video that debunks this myth: https://www.youtube.com/watch?v=A4WZm45XJ84I did all my tests where I did lose torque on old nema 23 motors (20+ years old that's why they were in need of repair) that were not of "hybrid" type. They do look identical inside to what he shown on the video so whatever the hybrid vs old stepper difference is...
-
@Dougal1957 I have started a second thread, specifically to talk about the possibility of upgrading the steppers as well. Feel free to chime in if you are interested.
https://forum.duet3d.com/topic/15860/delta-stepper-upgrade-advice-welcome -
@zapta said in Flexible coupling or direct mount for delta?:
FYI, Tech2C (the Hypercube designer) had this video about replacing stepper shafts https://www.youtube.com/watch?v=NmmFoBsSfEQ . The stepper he uses has consistent shaft diameter.
there is also a comment to suggest he common hybrid motros we use are not affected by dissasembly
For anyone who is concerned with the loss of torque by disassembling their motors, don't be. This does NOT apply to the hybrid stepper motors that we use in our 3D printers.
Here's a video that debunks this myth: https://www.youtube.com/watch?v=A4WZm45XJ84
(edit reading the whole tread would be smart; its been covered, still +1 for the link zapta!)
-
A quick summary of the motor advice thread so far: nema 23 is an interesting alternative and there are some good dual shaft steppers in that range. However, these all have a ~20 mm long main shaft and the pulleys for 9 mm belts are already 20 mm wide.
These is what I consider my options at this point:
-
Using a coupling (most likely full rigid) and a second axle. The increased length of the full setup requires me to rotate the steppers and belts 90°, so axles are square to the tower extrusions. Otherwise there is no space. This would require a full resign of the carriage and belt path as well.
-
Asking one of the stepper manufacturers to make me a set of custom steppers with increased shaft length. Most likely quite expensive, but the easiest route if a manufacturer is willing to do it.
-
Reducing the height of the pulleys from 20 mm to about 15 or 16 mm. This would cut into the space of the set screws and then an alternative way of securing them to the shaft would need to be found.
-
Moving to 6 mm belts, thereby reducing the pulley with to 16 mm and leaving 4 mm for a front bearing. Although I do not want to move back to 6 mm belts actually just for stretch reasons.
Another important point is stepper shaft shape. A lot of them seem to be D shaped, which is not suitable to mount a bearing to. This could be solved by the first and second approach above though.
-
-
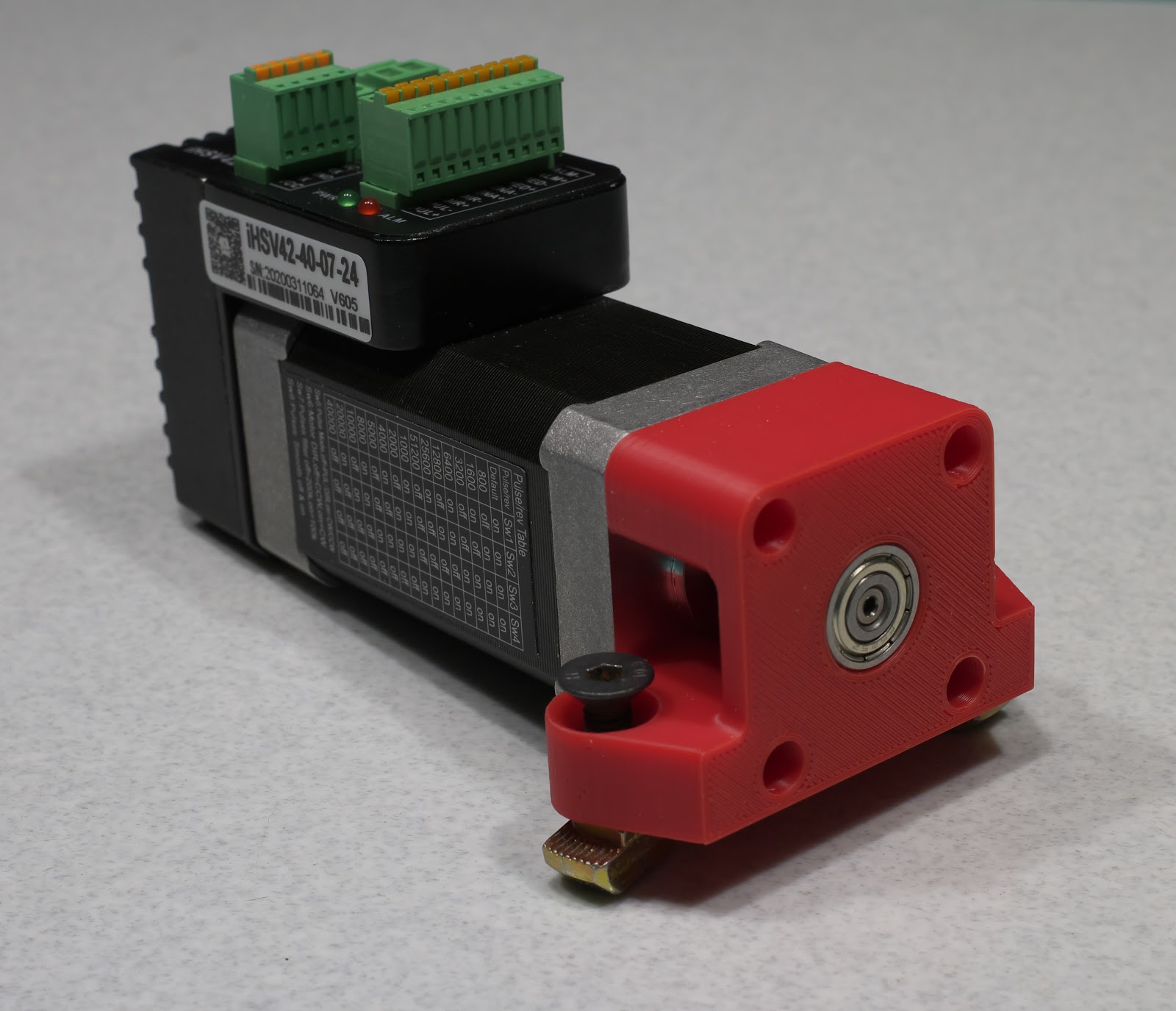
I recently designed this motor mount for a servomotor- the shaft is the "standard" 24 mm long x 5 mm diameter. The bearing in the end of the mount is an F625 and prints without support material. The pulley is for 6 mm wide belt- it probably wouldn't work with a pulley for 9mm belt.

-
@Nxt-1 The 6mm belt route may not be so bad. I'm still using them on my 2 and 3 Kg gantries. I know that you want to apply highish tension but if you are worried about stretch, assuming that it happens, then any stretch might occur when you intially tension the belts, but would there necessarily be any incremental stretch due to movement of the effector??? If you think of the belt as an electric band around 2 pulleys, it'll stretch when you pull the pulleys appart, but will it stretch any further when you rotate the pulleys? It would depend on the resistance to motion but on a Delta, that's likely to be small I would have thought.
-
@mrehorstdmd I was planning on something quite similar to that yeah.
-
@deckingman said in External bearings for stepper shafts:
@Nxt-1 The 6mm belt route may not be so bad. I'm still using them on my 2 and 3 Kg gantries. I know that you want to apply highish tension but if you are worried about stretch, assuming that it happens, then any stretch might occur when you intially tension the belts, but would there necessarily be any incremental stretch due to movement of the effector??? If you think of the belt as an electric band around 2 pulleys, it'll stretch when you pull the pulleys appart, but will it stretch any further when you rotate the pulleys? It would depend on the resistance to motion but on a Delta, that's likely to be small I would have thought.
Stretch will indeed occur mostly when initially tensioning but even during movements the belt acts like a spring I would say. An extremely bad spring but a spring nonetheless. The resistance to motion on a delta would indeed be low, but at high accelerations the speak load on the belts is what worries me.
-
I think my plan of action is going to be in this order:
- Ask stepper manufactures if they will make me a stepper with a custom shaft (single shaft, extra long). If they will and for a reasonable price (which I strongly doubt) this is the route to go I think.
- Get a nema 23 dual shaft motor and try 9 mm belts with the corresponding pulleys. This leaves no room for an external bearing in front so the bearing idea is dropped. If the motor seems fine at highish tension, then were good.
- Use the motor from 2) and move to 6 mm belts with the corresponding smaller pulleys. This leaves room for an external bearing in front and back.
- Use the motor from 2) use a rigid coupler to a second shaft, where the pulley for 9 mm belts and two bearings sit on. Redesign the belt paths, carriages and rotate the steppers 90° so they are at a right angle to the tower extrusions.
I am not sure about 3) and 4), they might be swapped around as proper belts are not really cheap and redesigning the carriages only costs me time and effort.