PanelDue and Motors will not function properly with Duet Wifi
-
If you go through that link again you can at least verify that the motors are turning correctly.
The rest comes down to getting the M208 min and max sizes correct, getting the endstop positions reflected accurately in M574, and then having the homing move directions correct in the homing macros.
M208 X0 Y0 Z0 S1 ; axis minima M208 X300 Y200 Z300 S0 ; axis maxima M574 X1 Y2 Z2 S1 ; x endstop at low end, y at high end, Z at high end. X homing moves are negative, Y homing moves are positive.Compare your setup to that photo and see what differs.
OK two parts...
Now I remember, the article listed seems a bit out dated, I keep getting warnings of obsolete commands. As @dc42 noted, the commands I should use are "G1 H2 X20", which based off the article looks like it's working as intended. The carriage moves in a diagonal path towards +X/+Y.
If the head moves diagonally in the +X and +Y directions, all is well.
For your example photo, I redid mine to match, with the endstop in the back, and set X to low and Y to high.
I tried the following config settings all with the same effect; the carriage follows negative homing commands moving it to the right (Beta) and away from the endstop (Alpha).
M208 X0 Y0 Z0 S1 ; axis minima
M208 X280 Y280 Z280 S0 ; axis maxima
M574 X1 S1 P"xstop"
M574 Y2 S1 P"ystop"
M208 X280 Y0 Z0 S1 ; axis minima
M208 X0 Y280 Z280 S0 ; axis maxima
M574 X1 S1 P"xstop"
M574 Y2 S1 P"ystop"
M208 X0 Y0 Z0 S1 ; axis minima
M208 X280 Y280 Z280 S0 ; axis maxima
M574 X2 S1 P"xstop"
M574 Y2 S1 P"ystop"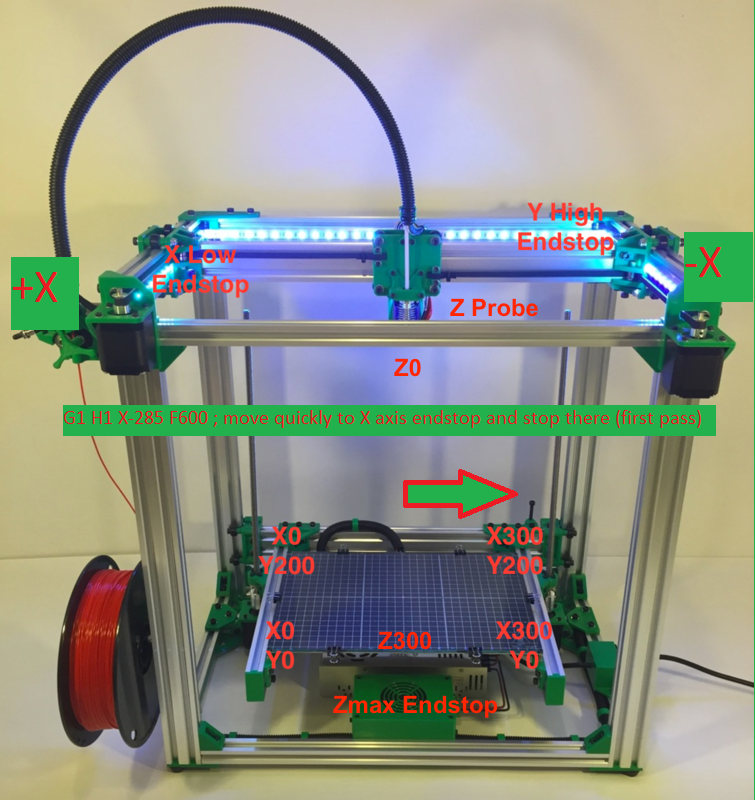
-
@firex726 said in PanelDue and Motors will not function properly with Duet Wifi:
I should use are "G1 H2 X20"
Did you send G91 first?
-
@firex726 said in PanelDue and Motors will not function properly with Duet Wifi:
M208 X0 Y0 Z0 S1 ; axis minima
M208 X280 Y280 Z280 S0 ; axis maxima
M574 X1 S1 P"xstop"
M574 Y2 S1 P"ystop"This one is correct. The others are not.
-
Hello,
Did you send G91 first?
Yes, I followed all the commands on the article as written, save for the movement syntax noted earlier.
This one is correct. The others are not.
Then those are currently loaded.
I got an updated photo.

-
If I reverse the X/Y motor directions, then that fixes X, but transfers the issue to Y.
So it'll HomeAll at the corner of Alpha, but any +Y command will make the carriage try to move more towards the front. So I can neither move it +Y since it'll hit the frame, nor -Y since the firmware wont let it move to less than 0.
And if I then swap the Y limits it appears to have no effect.
; Axis Limits
M208 X0 Y280 Z0 S1 ; set axis minima
M208 X280 Y0 Z280 S0 ; set axis maxima
I can set the Y endstop to the highside but then when I home it'll think it's at 0, 280, 0. Which atleast then will allow further movement, but only in a negative. And then when I try to print something it'll use +Y commands and thus hit the frame.
-
This post is deleted! -
M208 X0 Y0 Z0 S1 ; axis minima
M208 X280 Y280 Z280 S0 ; axis maxima
M574 X1 S1 P"xstop"
M574 Y2 S1 P"ystop"I’m not quite sure, it’s a complicated thread, but if your endstop for Y is at the front of your printer and if you want the X/Y origin to be in the front left corner, I think you must change the last line to
M574 Y1 S1
because - if I’m right - the Y-endstop sits at the low end.
-
@infiniteloop said in PanelDue and Motors will not function properly with Duet Wifi:
M208 X0 Y0 Z0 S1 ; axis minima
M208 X280 Y280 Z280 S0 ; axis maxima
M574 X1 S1 P"xstop"
M574 Y2 S1 P"ystop"I’m not quite sure, it’s a complicated thread, but if your endstop for Y is at the front of your printer and if you want the X/Y origin to be in the front left corner, I think you must change the last line to
M574 Y1 S1
because - if I’m right - the Y-endstop sits at the low end.
Double checked to try that, and it'll set it to 0, 0, 0. But any +Y command will keep it going towards the front of the frame.
I guess I want to mirror the Y while also keeping 0 at the corner, but instead of moving forward for +Y it'll go back.
Make sense? -
@firex726 That makes sense, if you want to have the origin of the X/Y coordinate system to be front/left.
– Just to be clear: at this point in space and time, your end stops and your min./max. settings are perfect. Don’t touch these lines again. –
Now, the question is how to change the direction of a single axis on a coreXY: honestly, I don’t know. With my cartesian, it’s simple, but here, either you know what to do, or one of the coreXY experts has to chime in.
Last, you will likely have to adjust your homeXY moves - possibly to a negative Y value.
-
@infiniteloop said in PanelDue and Motors will not function properly with Duet Wifi:
Last, you will likely have to adjust your homeXY moves - possibly to a negative Y value.
Tried that too... Sadly the issue is just when it's home. If I just move it around manually it'll be OK.
The motors and endstops seem to be OK based off the linked articles; it's just logically it think's it's mirrored once it hits home.
I think it was noted earlier that the firmware is expecting a Right hand build, but I have a Left hand one, so one axis will be flipped.
-
I think it was noted earlier that the firmware is expecting a Right hand build, but I have a Left hand one, so one axis will be flipped.
I noticed that. What I do not understand is this:
logically it think's it's mirrored once it hits home.
You mean that before homing, positive Y values move the head to the back of the printer?
-
@infiniteloop said in PanelDue and Motors will not function properly with Duet Wifi:
You mean that before homing, positive Y values move the head to the back of the printer?
Sadly no... Whichever is mirrored will move in the opposite direction. But due to the design of the mount it's easier to deal with on the Y.
I think I may just rebuild it to how the firmware thinks it's designed. I had assumed there would just be a simple setting I could flip to mirror whatever axis I want.
-
Alright, let's take one more shot at this.
Please post your current config.g and homing files.
Also please confirm where your Y endstop is located. Your photo shows X but not Y. From previous descriptions it sounds like it's located at the front as labeled on your last photo?
-
@firex726 said in PanelDue and Motors will not function properly with Duet Wifi:
there would just be a simple setting I could flip to mirror whatever axis I want
There are such settings. Any function of this whole setup can be flipped with a single change to config.g.
The issue is: Endstops at which end of the machine vs. travel direction vs. homing with + or - numbers in the homing files. They all have to match each other. And the VERY first thing that has to work is CoreXY movement.
Work through ONE of these at a time, and it can all be figured out.
Since we can't see your printer, nor exact results of various commands, it is very difficult to remote support (btw, I'm just a customer) unless we get so very meticulous in our terminology and photos and etc that everyone gets impatient... and then there is an ever so slight miscommunication and the whole 9 way (3 axis, 3 things to get aligned with each other) thing becomes confusing again.
Which is a really long winded way of saying: Work slowly, first movement (NO HOME), then endstops (still no home), then home to endstops and you will actually be able to figure this out faster on your own than all the interaction on the forum here.
We will all still try to help (I've been in workshops all day, so I didn't post much earlier today)... at the same time, the "do not attempt the next thing until the first thing works" approach can iron this out in minutes.
-
@Phaedrux said in PanelDue and Motors will not function properly with Duet Wifi:
Alright, let's take one more shot at this.
Please post your current config.g and homing files.
Also please confirm where your Y endstop is located. Your photo shows X but not Y. From previous descriptions it sounds like it's located at the front as labeled on your last photo?
Hi there,
Here ya go... I figured I'd start with fresh config files, and a new photo for us to base things on. The labels are for where I intend the machine to think each set of coordinates is at.
homez.g
homey.g
homex.g
homeall.g
config.g
-
This post is deleted! -
Ok that photo looks good. Looks like the Y endstop is at the front now for Y min.
Just noticed your drive mappings are pretty... non-standard
M584 X3 Y4 Z2 E1 ; set drive mappingDon't think it really matters here, but wondering if there's rhyme to the reason? Are we dealing with a blown driver or something?
Typically they'd be connected like so:
M584 X0 Y1 Z2:3 E4:5:6 ; Driver 0 controls the X motor, 1 controls Y, 2 and 3 control Z motors, 4 5 and 6 control E motorsAxis limits and endstops look correct.
; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X280 Y280 Z280 S0 ; set axis maxima ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S1 P"zstop" ; configure active-high endstop for low end on Z via pin zstopYour homing moves look correct.
; homeall.g G91 ; relative positioning G1 H2 Z5 F600 ; lift Z relative to current position G1 H1 X-285 Y-285 F600 ; move quickly to X or Y endstop and stop there (first pass) G1 H1 X-285 ; home X axis G1 H1 Y-285 ; home Y axis G1 X5 Y5 F600 ; go back a few mm G1 H1 X-285 F180 ; move slowly to X axis endstop once more (second pass) G1 H1 Y-285 ; then move slowly to Y axis endstop G1 H1 Z-285 F180 ; move Z down stopping at the endstop G90 ; absolute positioning G92 Z0 ; set Z position to axis minimum (you may want to adjust this)The next thing to nail down is the direction of rotation for the X/Y motors.
; Drives M569 P3 S1 ; physical drive 3 goes forwards M569 P4 S1 ; physical drive 4 goes forwards M569 P2 S0 ; physical drive 2 goes backwards M569 P1 S1 ; physical drive 1 goes forwardsNow in your setup P3 and P4 would be X and Y. This is where we'd do the
G91 G1 H2 X10andG91 G1 H2 Y10moves and go from there.https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareCoreXYPrinter#Section_Testing_motor_movement
The testing begins with the assumption that we'd be using
M569 P3 S0andM569 P4 S0so change those to S0 and do the movement test. -
This would also be a good time to test the endstops before even testing homing just to ensure they are configured corrected. If you trip them manually do they show as triggered in the machine status view?
-
Curious where the X endstop is, physically?
-
I believe it's on the printhead on the HEVO. You can see the Red green black wires for the optical endstop running to it. The flag is on the left X gantry block.