5 bar scara on duet3!
-
@michaelr123 thanks for the link to the article, the idea looks familiar. I am using matlab to crosscheck some calculation results, it's a great program.
-
+1 for matlab too! I was convinced I was going to go to my corporate job after college and convince them to give up excel for matlab, I now use excel for everything lol.
although, I can get a student license again for only $100 through my MBA program...
-
This post is deleted! -
@michaelr123 said in 5 bar scara on duet3!:
student license aga
I bought the matlab with some toolboxes (Simulink, Vision, Image, Robotics). The Corke book (on his homepage) about robotics includes freeware toolboxes of vision and robotics (simpler versions of the matlab toolboxes) for matlab, because Corke developed the source of them.
-
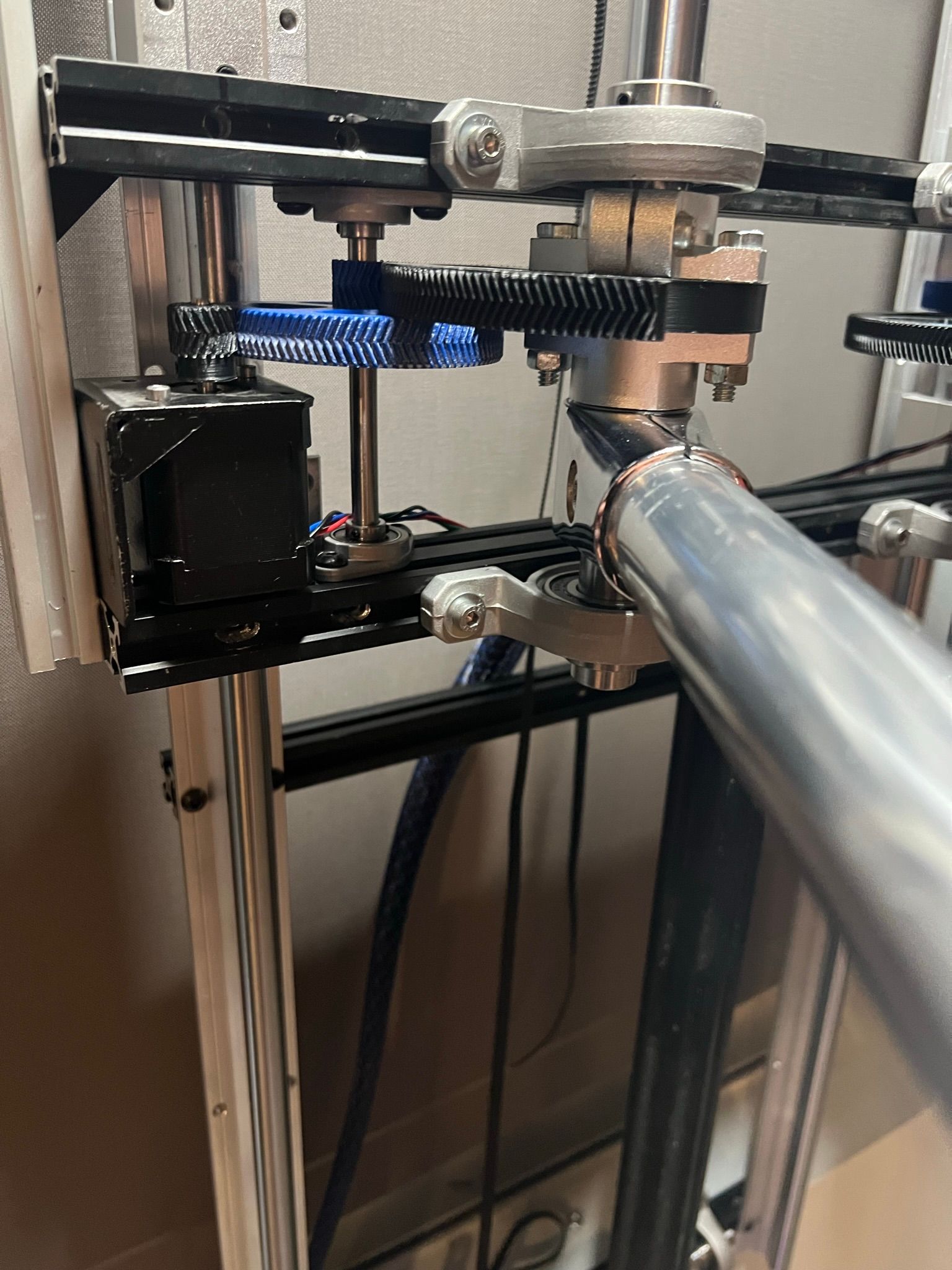
A few more updates, I installed the original all printed flex spline as well as my updated design that uses a 0.6M tooth at 118t. It seems a lot smoother and higher precision which is heading in the right direction. The next thing I need to solve is connecting the flex spline to the 20mm steel rod. 6mm sets screws threaded into the plastic are not cutting it.
Here's a quick video showing how much flex I'm getting before the screws slip on the shaft:
https://youtube.com/shorts/vS0aS8M9vDY?feature=share
This magnifies quite a bit once it gets all the way out to the end effector with the second arm set attached. I think I need to sort out this flex before I can expect any sort of reasonable print quality. At the moment, if the arm bumps into the model being printed at all it's just going to get knocked out of the way.
I'm working on better way to secure the flex spline to the rod which I think will help some. Otherwise a couple of other ideas I had:
- Large diameter / larger tooth profile flex spline system without raising the gear ratio any higher.
- Stiffen the ring gear part, there does seem to be some flex in this part as it is.
- add a second driver to the arm to double the gearing contact the rod sees.
- shorten the arms a bit. Maybe I need to take a small step back on this first crack at a scara arm.
-
@michaelr123 I'm constantly working at the same questions like you: where does the flex come from and what to do against it. Your ideas are all valid and worth a try. My own ideas, which overlap with yours partly:
- calculate and decide where the flex comes from. Some possibilities:
- long arm length => high torque => more vibrating/flexing => against: shorter arm
- material of flex spline teeth flex => against: material mix flex spline outer to flex, teeth harder, connection to shaft harder. Teeth harder e.g. metal/epoxy or similar containing on top of teeth or in direction teeth-to-middle of shaft
- hinge where the harmonic drive is mounted on flexes => press hinge to one side with eg spring so it doesn't change position when direction changes (ball bearings are pressed to one side always)
- my preference so far is a doubled arm (vertical)
Plastic has an E-module of about 3 GPa, compared to aluminium of 70 and steel of 210. E-module is a number to calculate how much material bends under force, so choosing something harder may fix the flexing. Of course you want a flexspline to flex, so the teeth shall be hard and the inner ring flexible. There are thermosplasts to be 3d printed and hard at the same time, this would be an option, besides using alu/steel. My own path is the (spring-)steel way.
Some of the commercial harmonic drives have about 200 teeth, and this a number which pleases me, because one can produce them easy with 200-step steppers. But this will not solve the flexing, only make it more precise.
I can't remember whether I have already written it, I tend to separate hinge mechanical construction from the actuator part:
- hinge, arm as stable as possible
- actuatator, teeth as precise as possible
This separate handling makes analyzing where flex comes from easier.
In your case, I suspend the flex of the teeth and/or flex of the big ring (= the flexspline part which is between teeth and shaft). Maybe it helps to make it stronger (=thicker and reinfoces by eg spring steel) to flex less.A final thought: it always help me to imagine that I am a part of the mechanism and how do I act/react: when there is force to the arm, where does the force go? Here it goes to the circular-spline versus flexspline teeth ("horizontal" in respect to teeth, to the flanks of the teeth), so how to enforce it and remove play? Maybe there is teeth-teeth play also, then there needs to be more force from flexpline in direction of circular spline (vertical to shaft in direction outer). More engaged teeth (as described in the patents) will help as well. Another possibility is to make the teeth steeper (but not too steep, as they need to meet them), because steeper meens to have more force and precision. You can start mixing steep with less steep (steep for force and precision, less steep to make sure the teeth meeth each other. One tooth off would be a desaster for precision*)).
*) when mixing, be aware to jump the right amount after each round into the same kind of teeth (eg 200-204 and two kinds of teeth, this should work).
-
final thought:
I find harmonic drives fascinating because of the following idea in the image:
- green is the force of the wave generator pressing the flexspline teeth against the circular spline teeth. This defines the position of the teeth and is with low pressure. It also hinders position change with low force (detent torque of stepper may be enough as brake).
- red arrow is the force of your arm sideways to the flanks of the teeth
The different direction of the forces allow to optimize them separately. Your current problem is with the red arrow. but maybe the green one has not pressed the teeth enough.
-
All great points. First I need to develop a clamp that fixes the output to the shaft. From there I can figure out where the flex is coming from. I can take another crack or two at improving this aspect of the machine, but I may just need to get it actually up and running to see where I'm at. I may also need to humble myself a bit and scale down the arm depending on how testing goes. I think this is the best iteration from a stiffness and resolution standpoint.
I could switch from ABS to PLA on the ring gear to have a stiffer material there to your point. I'll also shrink the height of the flex spline as I don't think it's necesary to have so much length there with plastic. I also would like to mount the ring gear directly to the 80/20 extrusion while also further increasing the diameter. I'll need to reconfigure the motor mount a bit, but all those changes should help. Maybe I'll try making a huge harmonic drive just to see how it performs under the sort of torque. 200t at a .8M gear tooth or something like that.
Another idea I had was to just print the spline without the cup at the bottom. Then I could use a steel hose clamp to fix the the flex spline tightly to a set block that can grab onto the 20mm shaft. I'll draw up a picture here to explain, but it would also help reduce the amount of printing that requires a .25mm nozzle to help speed up prototyping.
-
@michaelr123 said in 5 bar scara on duet3!:
print the spline without the cup at the bottom
The advantage is that you can replace the teeth-part fast when it is worn out, if you find a good connector between the two parts. And exchange ratios fast.
PLA is even lower e-module than ABS. PLA has between 1 and 3 GPa, ABS has 2.3 GPa. I would recommend to make it thicker, but use a flexible material like PP (polypropylen). Thermoplast, but very difficult to glue. An example application is Hylite (see Zatsit).
-
I am not sure what the reason is for the flexibility, but I hope you find it out. I'm sure the commecial producers are using finite element methods to find out the best balance between stability and flexibility.
-
Hello!
More changes and another update. I played around with a few more harmonic drive designs, and found they all had more backlash at the end effector than what I wanted. I had better luck with gear drives, and I also have found an appreciation for the back-drivability. So I scrapped the old design, developed a 45:1 gear drive design and rebuilt it one more time. I now think I have something workable at this point!
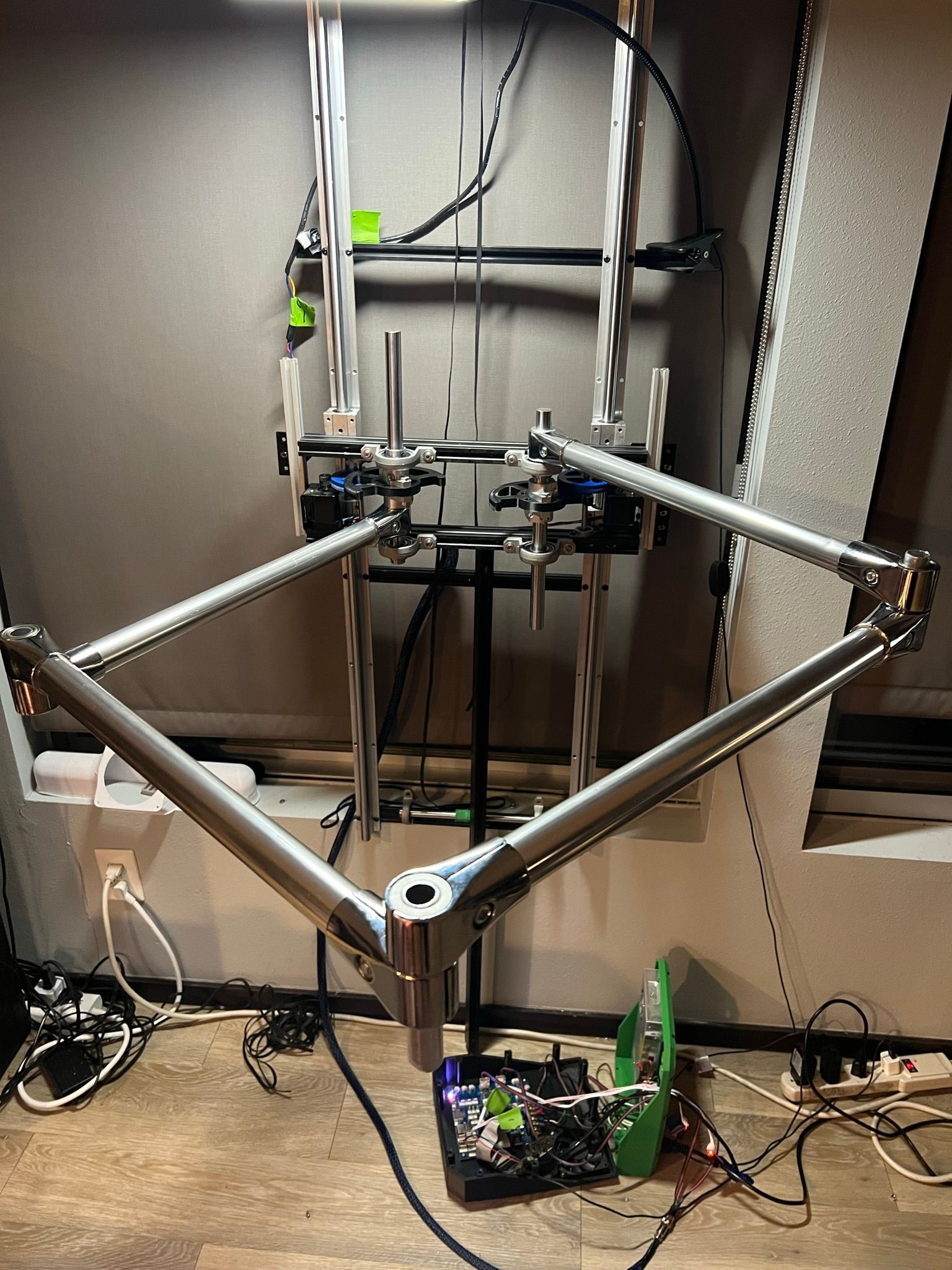
https://youtube.com/shorts/Yw_aW_2YJ5AAs you can see in the video, the system runs very smooth.
this is still running with just manual move codes, but now that I've got an XY motion system I'm going to start rebuilding the electronics to start working on calibration! List of things to knock out:
- Get endstops and other electrical bits cabled and installed
- Calibrate XY motion system
- Finish Z axis
- install extruder system and get a toolboard working
- get the build plate setup
- print something!
-
@michaelr123 congratulations, this looks like a very stable and reliable solution at the stepper+gear side! Please go ahead for a good printer!
-
@michaelr123 I'll proceed with building robot prototypes soon, using harmonic drives. It would be nice if you could give a short summary which problems you had to DIY them, especially why you had backlash.
-
Yeah I'd be happy to! I'll throw together a little YouTube video going over each design for you.
I think it comes down to how tight you make the fit and the ratio between the long and short sides of the elliptical driver. There's more work to do with that I think. You need to be careful with how much torque is then required to drive the elliptical driver. Depending on the application, the ones I have would probably be fine, but with a 28" lever arm it was just too much backlash or flex. I just don't want that to add more error when I start calibrating the xy system.
What kind of robot are you building? I'd be interested to see what you're working on.
-
@michaelr123 said in 5 bar scara on duet3!:
What kind of robot are you building? I'd be interested to see what you're working on.
I started about three years ago with 5-bar-scara and developed the kinematics for it for RRF. Since then I'm developing robot kinematics, which includes all sorts of combinations of rotary and linear axes. So I'm building 6 axis industrial robots, but also CNC 5 axis and Cartesian ones. With extensions, the robot kinematics can support parallel kinematics also, like 5-bar-scara, CoreXY 5 axis and tripteron.
The project thread is https://forum.duet3d.com/topic/17421/robotic-kinematics/330?_=1670950282842 and https://forum.duet3d.com/topic/30228/robot-prototypes-robot-kinematics (but there are other pages about prototypes, because I made several tries) and documentation at https://docs.duet3d.com/User_manual/Machine_configuration/Configuring_RepRapFirmware_for_a_Robot_printer with multiple linked pages.
I've started with what I read about robots, the Siciliano book, based on Denavit-Hartenberg, but discovered a half year ago that screw theory is superior. Then I detected geometric algebra as method to solve some unsolved problems, and this is the status today. I rewrite the kinematics to the new methods and start prototyping after it.
An open question is Stewart-Gough. I'm not sure whether I can manage to develop it. And one interesting topic is to support compliant hinges. (I mean e. g. the book Howell Handbook of Compliant Mechanisms).
-
I stand on the shoulder of giants then! Thank you for the hardwork on that. I took a robotics class in college and at one point was really good at inverse kinematics. I’m not sure I could figure out the pages of differential equations at this point

The peak of my own work in this space was a matlab script that could convert XYZ gcode from slic3r to RR-theta for a parallelogram robotic arm I used for a robotic painter in an art competition in college. As long as you keep things determinant its all good. As soon as you add additional degrees of freedom you need to start adding additional algorithms to sort through infinite solution spaces. 6 axis is just infinity cubed the problems!
-
@michaelr123 Paden-Kahan divided the inverse kinematics problem into parts of solving one or two angles each, getting all 8 solutions for industrial robots. There are combinations of unsolved configurations, which I want to solve with the help of geometric algebra. Geometric algebra is great, but difficult to manage. One problem is that some development is too new to be standardized, the authors use different syntax and methods. I try to document what I understood...
I like parallel kinematics like 5-bar-scara, so it is sure that I'll implement it into robot kinematics. If you want, you can test it when I have a build.
-
@JoergS5 I don't understand half of the math-talk here, but it reminds me of the NASA-movie "Hidden Figures" where they used 17th century math in the end (Euler angles).
-
@o_lampe I love mathematics since ever, but nothing of all the topics I learn today was tought in school... Geometric algebra is from 19 th century, not so far away from your Euler angles.
I BTW used Euler angles at the beginning for robot kinematics, but it has some serious restrictions, the main one the gimbal lock, which means that some movements cannot be made, especially experienced in aviation.
-
Hello again!
I've got some time tomorrow to work on this again, any good recommendations for calibrating a 5 bar scara for dimensions? I got endstops in place and everything is spinning the right direction again so now I'm trying to ensure that my M669 code is correct. from some initial measurements I'm not quite there in terms of lining up the hotend with where the system says it should be.
One thing that might be nice to know is the angle or rotation the system thinks each arm is at. It would be good to have that piece of info to sort out where the discrepancy may come from.