Homing direction not changing
-
Setting up a Duet 2 Wifi for a custom 3D-printer build and I couldn't find a way to setup stepper drivers on the expansion board ports in RRF, so I'm manually tinkering the config file now. (First time I'm doing this).
X-axis driver is on output 5, and the X-axis homing switch is on the main board, xstop port. X-axis physical switch is on the right (high-end).
I set the X-motor direction such that I can hit X+100 etc on the DWC dashboard and the motor moves in the correct direction now. But changing the endstops from low-end to high-end does not change the direction that it homes towards... it's always to the left (incorrect). Am I missing something here?
M569 P5 S1 R1 ; Forwards x-axis, enable = High
M584 X5 Y6 Z0:1:2 E3 ; set drive mapping, 3 Z motors
M574 X2 S1 P"xstop" ; x-stop on high-endFull config file attached in case there's something else relevant.
config.g -
@neil
Za and Zb are connected in series and together they have only one driver.
I assume you have connected two axes there.DDA5X... 0.9° Stepper... Linearrails... Duet 2 Wifi... PT100 Board... Duet IR-Probe... Dyze Pro Kit up to 500°C.. etc
Thingiverse -
@norder said in Homing direction not changing:
@neil
Za and Zb are connected in series and together they have only one driver.
I assume you have connected two axes there.I have 3 Z-motors, connected to ports "Drive 0", "Drive 1" and "Drive 3". So 3 motors, each with it's own driver. Z is working fine.
-
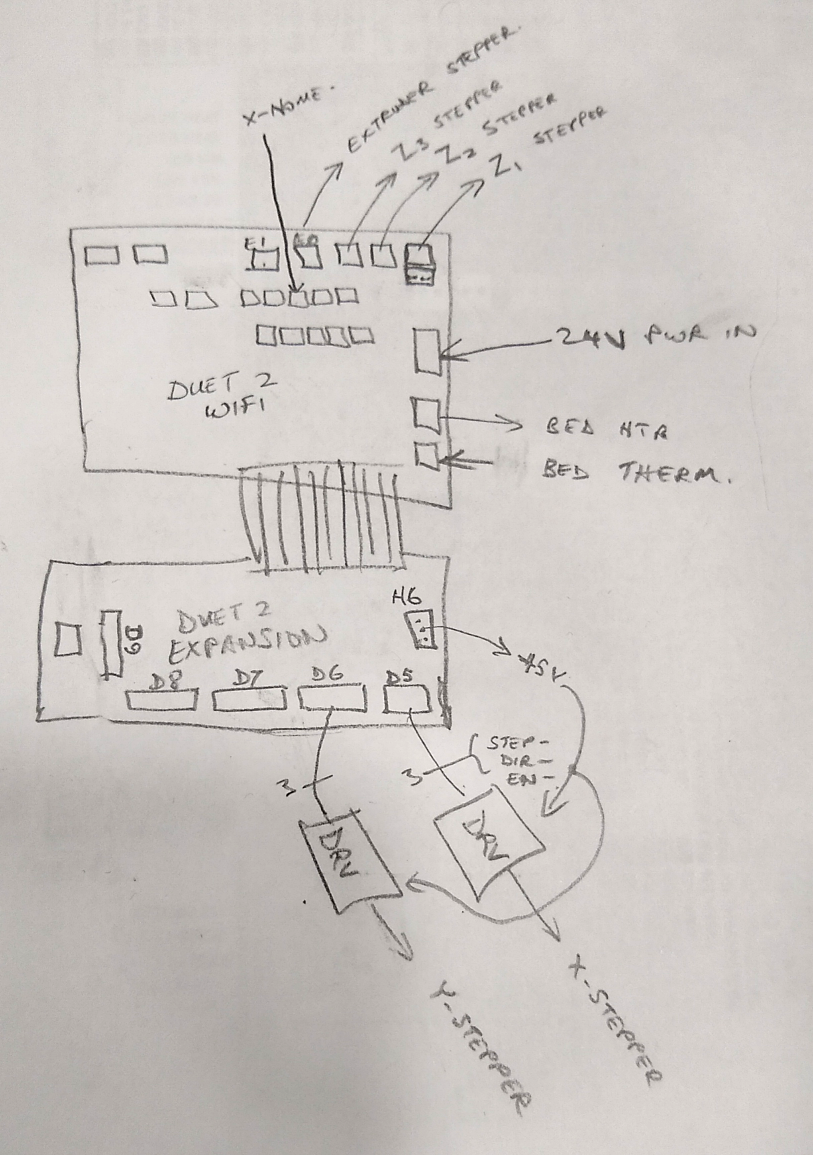
This is my layout:
-
Ok, looks like I got it. I wasn't aware that there was a separate homing file. Hadn't paid attention to it before as RRF configurator was generating my files.
-
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
undefined Phaedrux has marked this topic as solved