Layer shift detection?
-
@mrehorstdmd said in Layer shift detection?:
@zapta A closed loop motor/system wouldn't be able correct for all errors. If a print warps and stands up and blocks the nozzle, a closed loop system is going to try to force the nozzle to the correct position. That could cause problems.
I think a closed loop stepper is best used in a system where an object has to move to a target location, like maybe a pick and place machine, as opposed to something that is moving continuously along a specific path.
Sorry but this is so much misinformation.
I can´t help but disagree with that. The print head (with a servomotor) will always try to reach the position given by the microcontroller, and as long as the printhead is held up it will stay there, and as soon as the dictated direction changes and the print head can "slip by" it will go to the new correct location.
Also, all servos can throw out an alarm when there is a specified lag behind the commanded position. I have configured my JMC servo to throw an error if either a specified Amp draw is reached (in my case 9A) or it lags at least 200 steps behind the commanded position. It will throw an alarm and stop, and wait for a reboot.
You can connect the alarm to a free endstop and configure that as an E-stop.I have long said that steppers are long overdue for being phased out, with servos coming down in price so drastically.
Just take this for example, this is the servo i`m using.It´s a 180W nema 23 size servomotor with an included onboard driverboard.
It costs 106 € including shipping (70 without, for when buying multiple)
Now, considering that a good quality stepper already costs 40€ plus the stepper driver (I dont know how much, maybe 10-20€ for the chip?) which equals to 50-60€, you begin to question the reason behind steppers, apart from "it´s always been steppers".
Just some of the benefits:- Closed loop
- Automatic e-stop when an alarm is detected, within microseconds, not at the end of the layer and without homing
- You only need to route power, step and direction to the servo, which means you can share power lines.
- You won´t get als much electrical interference due to inductance like with steppers. Which means you can run thermocouple lines closer to the rest.
- They can rev much higher than steppers, the nema 23 can do 3000 rpm with full torque up to 2000 rpm.
- They have a very smooth motion profile from the start, no 256-interpolation necessary. You can configure them with up to 160.000 steps per revolution if you wish. Not necessary though, i run mine with 5000 steps per rev.
- Dramatically lower power consumption, the servo only consumes power when you accelerate it or turn a load.
Steppers always consume the specified amperage x voltage. - You can configure the servos to deliver more power for a shorter period of time (duty cycle). They are rated for example for 180W at 100% duty cycle. You can run them at 540W, or 300% for a duty cycle of 10% Which means normally 1 minute running at 300%, then 9 minutes cooling off at reduced load.
- (added) They are DEAD SILENT. Not a whisper coming from them, even going at 400mm/s or accelerating at 5g. No stealthchop necessary.
I could list some more, but i think that is enough for now.
Also, you can get the nema 17 version for 62€.
I have long asked dc42 why he focuses so much on integrated stepper drivers.
A cheaper board with no stepper drivers and only the pinouts for external drivers would be a real seller.
I am so happy with my nema23 servos, my next printer will have all axes equipped with it.
The servo is so powerful, it can accelerate my 5kg gantry with 5g (~50.000 mm/s²) if i want it to, and not a single skipped step in sight.I think it´s a shame that the industry is moving towards linear servomotors already, and we can´t even adapt normal rotational servomotors yet.
-
@NitroFreak said in Layer shift detection?:
I have long asked dc42 why he focuses so much on integrated stepper drivers.
A cheaper board with no stepper drivers and only the pinouts for external drivers would be a real seller.
I am so happy with my nema23 servos, my next printer will have all axes equipped with it.
The servo is so powerful, it can accelerate my 5kg gantry with 5g (~50.000 mm/s²) if i want it to, and not a single skipped step in sight.I think it´s a shame that the industry is moving towards linear servomotors already, and we can´t even adapt normal rotational servomotors yet.
I've had tons of discussions with people using servos who have never used an integrated stepper driver before. What they don't realize is that these integrated drivers already work close to how a closed loop system would, because they, pardon my Chinese, adjust the control parameters on the fly based on the back EMF and they are darn good at it. So good at it, that it's creepy.
You are right about servos, but integrated drivers have a place and are the cozy future. I'm impressed what they can do on my printer with Nema17. I think dc42 didn't think most people would try slapping multiple 10kg gantries onto them, and I think most people don't.
-
@NitroFreak said in Layer shift detection?:
I have long asked dc42 why he focuses so much on integrated stepper drivers.
He stated (in other threads) that expansion boards with no drivers, and outputs for external drivers, are on the roadmap for Duet 3. No dates, yet.
Delta / Kossel printer fanatic
-
@Edgars-Batna said in Layer shift detection?:
I've had tons of discussions with people using servos who have never used an integrated stepper driver before. What they don't realize is that these integrated drivers already work close to how a closed loop system would, because they, pardon my Chinese, adjust the control parameters on the fly based on the back EMF and they are darn good at it. So good at it, that it's creepy.
You are right about servos, but integrated drivers have a place and are the cozy future. I'm impressed what they can do on my printer with Nema17. I think dc42 didn't think most people would try slapping multiple 10kg gantries onto them, and I think most people don't.
I have used them (I have 2 duet 2´s) and even with them working well, they can´t reliably detect a missed step.
What i don´t understand about the duet 3´s is that they are obviously geared towards those multiple 10kg gantries with big steppers moving them, seeing as they have 4A drivers.
BUT, Why does it still only have 30V maximum rating? It does not make sense for big steppers. At least go to 48V to use the cheap server power supplies.
I´m not going to mention that those bigger steppers are even more expensive and cut well into the territory of a nema23 servo.Also, i forgot one of the most important aspects about servos, so here we go:
- they are dead silent! No stealthchop required!
-
@Danal said in Layer shift detection?:
@NitroFreak said in Layer shift detection?:
I have long asked dc42 why he focuses so much on integrated stepper drivers.
He stated (in other threads) that expansion boards with no drivers, and outputs for external drivers, are on the roadmap for Duet 3. No dates, yet.
You got me wrong, i dont want to buy a duet 3 with 6 expensive drivers only to expand it with another board that adds additional cost.
Give me a Duet 3 without any stepper drivers that has the breakout pins right on the board, and I´d be so happy.
What do people use those huge stepper drivers for anyway?
-
@NitroFreak said in Layer shift detection?:
@Danal said in Layer shift detection?:
@NitroFreak said in Layer shift detection?:
I have long asked dc42 why he focuses so much on integrated stepper drivers.
He stated (in other threads) that expansion boards with no drivers, and outputs for external drivers, are on the roadmap for Duet 3. No dates, yet.
You got me wrong, i dont want to buy a duet 3 with 6 expensive drivers only to expand it with another board that adds additional cost.
Give me a Duet 3 without any stepper drivers that has the breakout pins right on the board, and I´d be so happy.
I get it. I'm just repeating what Dave said.
What do people use those huge stepper drivers for anyway?
Printers.
-
@Danal said in Layer shift detection?:
Printers.
I get it, but why? If you have to use nema 34´s, you are already more expensive than servos that have similar power output.
Servos have the advantage that they are very power dense, so they require less metal and copper to output the same power (factor 3)
They are only more expensive because they require the encoder and feedback loop, but those stay constant with size going up, so they amortize really quickly going up in size and stepper nema 23 setups with similar power output already cost more. -
@NitroFreak said in Layer shift detection?:
i dont want to buy a duet 3 with 6 expensive drivers
You are kidding, right? Duet 3 uses TMC5160A-TA. These are DigiKey Qty 2000, $3.11 each. I'm sure the board builders get them for under $3. Removing six of them cuts $18 or less from the internal cost. Maybe $18.50 if you count the passives.
Like any technology, that number will fall over the lifecycle of the D3.
I'd think the more important thing is the lack of pins for Step/Dir/Ena, or SPI equivalent, that are fully supported for external drivers. Expansions will provide that.
Delta / Kossel printer fanatic
-
@NitroFreak said in Layer shift detection?:
If you have to use nema 34´s
Very, very, few of these in Hobbyist printers. TMC5160 may be a bit of overkill for Nema17 if one looks only at current; at the same time, it is the "latest and greatest" at things like interpolation, whatever.
And the points I made about price above, they get even less if you compare a prior generation to the 5160. In other words, the incremental cost of "latest greatest" is probably under $6 per board, even if "latest greatest" is not strictly speaking 'required' for most of D3 installations.
-
And, having said all of that, my second or third post in this thread was "Also, the 'real' way to do this is closed loop...".
So I am totally with you on servos (or equivalent). I'm just pointing out that the factual cost of those TMC drivers is only a few percent of the board cost.
I'd love to see more direct support for closed loop.
-
@Danal said in Layer shift detection?:
@NitroFreak said in Layer shift detection?:
i dont want to buy a duet 3 with 6 expensive drivers
You are kidding, right? Duet 3 uses TMC5160 DigiKey Qty 2000 they are $3.11 each. I'm sure the board builders get them for under $3.
Removing six of them cuts $18 from the internal cost. Maybe $18.50 if you count the passives.
Yes, i can see that you know how pricing works. If you consider that the components cost maybe 80$ ( the processor costs 8€, the rest is cents) cutting 25% of the internal costs is quite a bit. Now, hoping that they keep the profit margin % the same, those 18$ can easily amount to 50$ saved on the final product. And especially considering that one does not need to buy the separate 30€ expansion breakout board (why can the breakout pins not be on the board from the start?) That is a substantial chunk of change. Also the PCB itself shrinks, further reducing cost.
So no, i am not kidding. -
@NitroFreak Interesting. If the servo gets hung up, or misses steps, is there some means of feeding that information to the extruder so it won't keep trying to squirt plastic?
-
@mrehorstdmd said in Layer shift detection?:
@NitroFreak Interesting. If the servo gets hung up, or misses steps, is there some means of feeding that information to the extruder so it won't keep trying to squirt plastic?
Yes, the servo has an alarm output that switches from 0 to 5v where you can run (dont have to) a wire from the servo to the duet which treats it as an endstop. You can configure that endstop as an emergency stop.
https://duet3d.dozuki.com/Wiki/Connecting_an_Emergency_Stop -
@NitroFreak But it doesn't "recover" from lost steps, etc., merely shuts down the print?
I like the idea of silent operation- I have a sand table that could use some additional quieting down...
I'm looking at the NEMA-17 motor/driver you linked and the torque spec looks really low. 0.48 Nm can't be right for 52W motor, unless that's torque at maximum rpm. How do you select these things for a given application?
I found the manual here. Are there any special tricks required to interface these to a Duet board?
Do you notice any differences between steppers and servos in terms of things like ringing in prints?
-
@NitroFreak Parts cost is the only driver of price? Assembly labor? Firmware is not a contributor? Trade show marketing (well... not right now)? Support? A dozen things I forgot? Price and cost are only very loosely related, and neither of us really knows how Duet3D chooses to run internally. Therefore, let's turn the question around:
Retailers have posted prices of $230 USD or 250€ to 260€ today for a 6HC, what would you expect to pay for a driverless "base" board?
Delta / Kossel printer fanatic
-
@mrehorstdmd said in Layer shift detection?:
@NitroFreak But it doesn't "recover" from lost steps, etc., merely shuts down the print?
I like the idea of silent operation- I have a sand table that could use some additional quieting down...
I'm looking at the NEMA-17 motor/driver you linked and the torque spec looks really low. 0.48 Nm can't be right for 52W motor, unless that's torque at maximum rpm. How do you select these things for a given application?
I found the manual here. Are there any special tricks required to interface these to a Duet board?
Do you notice any differences between steppers and servos in terms of things like ringing in prints?
It can, it depends how you configure it. If you set it to never put out an alarm, it will not throw out an alarm and will just try to reach the next commanded position.
I know, it´s perfect, it´s even so perfect that i already suggested that servo to you in the thread that you opened about that sand table

The 52W nema 17 servo has a continuous torque of 0.125 Nm right up until 4000 Rpm, the 78W version has 0.185 Nm. The 180W Nema 23 version has 0.57 Nm right up to 3000 Rpm.
Check page 45 and 47 of the manual posted for the "curves"
You shouldn´t forget that steppers have big torque at basically 0 Rpm, but then fall off really quickly.
This is what a nema 17 torque curve looks like for a really beefy 63mm stepper (what e3d calls a super whopper)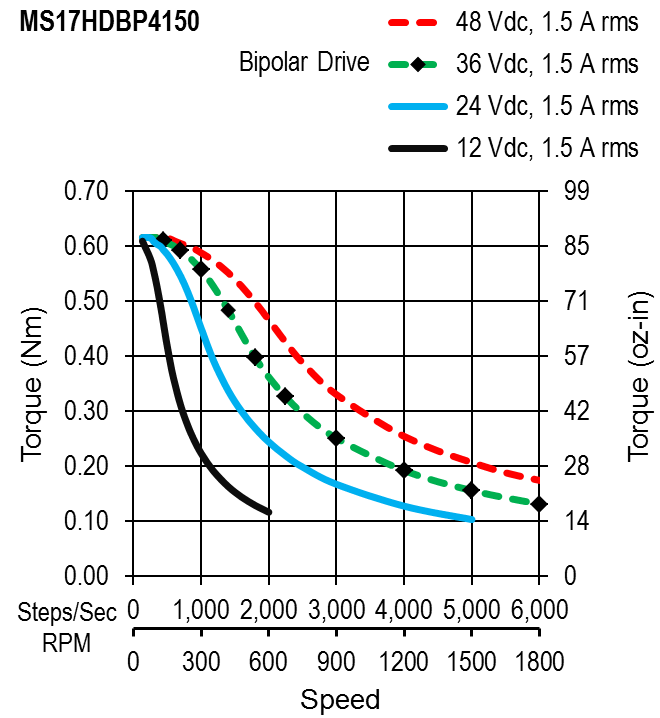
For 24V, you can see that at around ~800 RPM the torque already falls below the value of the 78w nema 17 servo (0.185Nm)
What this means is that you can have a onstant acceleration at any speed without worry of the motors running out of torque. Basically, if your acceleration is fine at 10mm/s, then the same acceleration will be fine at 400mm/s.
The same acceleration at 400mm/s with steppers would result in lost steps, even though at 10mm/s it was fine. -
@Danal said in Layer shift detection?:
@NitroFreak Parts cost is the only driver of price? Assembly labor? Firmware is not a contributor? Trade show marketing (well... not right now)? Support? A dozen things I forgot? Price and cost are only very loosely related, and neither of us really knows how Duet3D chooses to run internally. Therefore, let's turn the question around:
Retailers have posted prices of $230 USD or 250€ to 260€ today for a 6HC, what would you expect to pay for a driverless "base" board?
You´re dragging retailer margins into this.
With your thinking, a thermocouple daughterboard must cost loosely the same as a duet 3 because of firmware, trade show marketing, support and a dozen other things.Let´s look at a real world comparison.
I´m choosing the duex5 expansion board and the expansion breakout board.
https://www.duet3d.com/Duex5
https://www.duet3d.com/DuetAddons/Expansion_Breakout
Both can house a theoretical 5 steppers. I know the Duex has heater mosfets, but let´s just subtract 10 pounds from the price for that.
That makes a price difference (82.50-10)-25 = 47.50 pounds. So roughly 50 pounds for 5 stepper drivers. (10 for one)
This is a real world price difference for the consumer that you can hopefully also comprehend.
So I don´t think its unrealistic expecting to slash 60 pounds off the price of the duet 3 for a version without 6 stepper drivers- especially considering they are the beefier cousins that cost more.
So, Price right now on Duet3d website for the Duet 3 is 185 Pounds. I´d expect a realistic price of around 125 Pounds for a Duet 3 without drivers.
Please let me know how wrong my assumptions and calculations are. -
@NitroFreak said in Layer shift detection?:
You shouldn´t forget that steppers have big torque at basically 0 Rpm, but then fall off really quickly.
This is what a nema 17 torque curve looks like for a really beefy 63mm stepper (what e3d calls a super whopper)That doesn't entirely apply to integrated stepper drivers like TMC used in the Duet. They get very close to constant torque because of what I said previously.
-
@NitroFreak said in Layer shift detection?:
Give me a Duet 3 without any stepper drivers that has the breakout pins right on the board, and I´d be so happy.
It's just a matter of market demand. If there is sufficient demand, Duet will be happy to come with such a product. One thing you can do is committing for large quantities for whatever product you want.
-
@NitroFreak said in Layer shift detection?:
So, Price right now on Duet3d website for the Duet 3 is 185 Pounds. I´d expect a realistic price of around 125 Pounds for a Duet 3 without drivers.
Sounds good to me. And, as I mentioned in a prior post, I'd actually like to see this as well. I support the move of the entire industry to closed loop.
Please let me know how wrong my assumptions and calculations are.
Perhaps my "Are you kidding?" kicked this off on the wrong foot. I apologize.
Seriously, tone is really hard to convey when communications are entirely written, and I used a phrase that might have worked in a face-face conversation, yet that clearly caused miscommunication on a forum.
I apologize.