@jumpedwithbothfeet
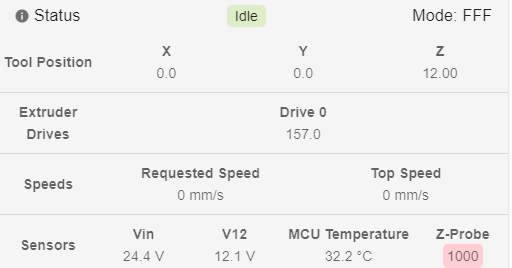
Could see in the console that my Trigger Height wasn't updated from Config so it was set to 0.7 and should be a lot more. ")
Thanks for the help. This i didn't know to check for.
@jumpedwithbothfeet
Could see in the console that my Trigger Height wasn't updated from Config so it was set to 0.7 and should be a lot more.
Thanks for the help. This i didn't know to check for.
@rjenkinsgb
I only use it when calibrating. This i only do when things begin to look weird.
It is a piece i take of when i am printing.
Hi and thanks for a quick answer.
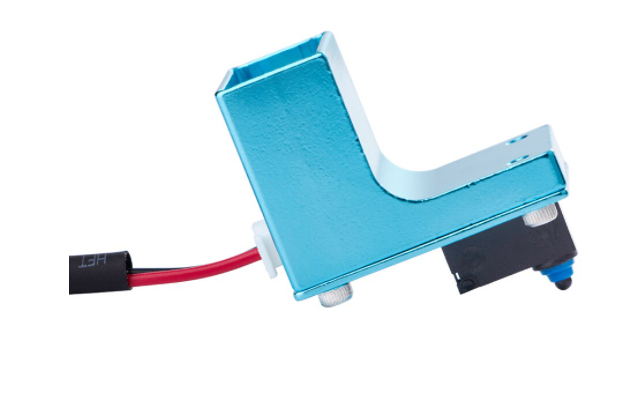
I Use the one folowing with the Printer.
It is a small device you set under the Heater with a little switch on.
The Height i have gotten with the G30 S-1 command
Hi all
I am new to Delta printers, but not new to Duet.
But i have a weird issue. When i Say G1 Z0 it stops at Z12 and cant get it to move lower.
; Configuration file for Duet 3 (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.5 on Wed Nov 03 2021 20:04:30 GMT+0100 (Centraleuropæisk normaltid)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"AnyCubic Predator" ; set printer name
M665 R227 L440 B185 H457.7 ; Set delta radius, diagonal rod length, printable radius and homed height
M666 X0 Y0 Z0 ; put your endstop adjustments here, or let auto calibration find them
; Network
M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Drives
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.3 S0 ; physical drive 0.3 goes backwards
M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping
M350 X16 Y16 Z16 I1 ; configure microstepping without interpolation
M350 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z80.00 E380.45 ; set steps per mm
M566 X1200.00 Y1200.00 Z1200.00 E1200.00 ; set maximum instantaneous speed changes (mm/min)
M203 X18000.00 Y18000.00 Z18000.00 E1200.00 ; set maximum speeds (mm/min)
M201 X1000.00 Y1000.00 Z1000.00 E1000.00 ; set accelerations (mm/s^2)
M906 X1000 Y1000 Z1000 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 Z0 S1 ; set minimum Z
; Endstops
M574 X2 S1 P"io4.in" ; configure switch-type (e.g. microswitch) endstop for high end on X via pin io4.in
M574 Y2 S1 P"io5.in" ; configure switch-type (e.g. microswitch) endstop for high end on Y via pin io5.in
M574 Z2 S1 P"io6.in" ; configure switch-type (e.g. microswitch) endstop for high end on Z via pin io6.in
; Z-Probe
M558 P5 C"^io7.in" H20 F120 T6000 ; set Z probe type to switch and the dive height + speeds
G31 P500 X0 Y0 Z19.027 ; set Z probe trigger value, offset and trigger height
M557 R85 S20 ; define mesh grid
; Heaters
M308 S0 P"temp0" Y"thermistor" T100000 B4300 R2500 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out3" T0 ; create bed heater output on out1 and map it to sensor 0
M307 H0 B0 R0.398 C315.0 D2.01 S1.00 V24.4
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp1" Y"thermistor" T100000 B4300 R1700 ; configure sensor 1 as thermistor on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out2 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C
; Fans
M950 F0 C"out7" Q500 ; create fan 0 on pin out7 and set its frequency
M106 P0 S1 H1 T45 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"out8" Q500 ; create fan 1 on pin out8 and set its frequency
M106 P1 S1 H-1 ; set fan 1 value. Thermostatic control is turned on
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings are not defined
;M591 D0 P2 C"io8.in" S1 ; Filament Sensor Setup
;M591 D0 ; display filament sensor parameters for extruder drive 0
; M591 D0 P2 C"io8.in" S1
M501 ;override file call in
; config-override.g file generated in response to M500 at 2021-11-28 17:32
; This is a system-generated file - do not edit
; Delta parameters
M665 L440.000:440.000:440.000 R227.459 H457.639 B185.0 X-0.150 Y0.213 Z0.000
M666 X-0.217 Y-0.042 Z0.258 A0.00 B0.00
; Heater model parameters
M307 H0 R0.398 C315.000:315.000 D2.01 S1.00 V24.4 B0 I0
M307 H1 R2.429 C140.000:140.000 D5.50 S1.00 V0.0 B0 I0
; Workplace coordinates
G10 L2 P1 X0.00 Y0.00 Z0.00
G10 L2 P2 X0.00 Y0.00 Z0.00
G10 L2 P3 X0.00 Y0.00 Z0.00
G10 L2 P4 X0.00 Y0.00 Z0.00
G10 L2 P5 X0.00 Y0.00 Z0.00
G10 L2 P6 X0.00 Y0.00 Z0.00
G10 L2 P7 X0.00 Y0.00 Z0.00
G10 L2 P8 X0.00 Y0.00 Z0.00
G10 L2 P9 X0.00 Y0.00 Z0.00
And my Homefile
; homedelta.g
; called to home all towers on a delta printer
;
; generated by RepRapFirmware Configuration Tool v3.3.5 on Wed Nov 03 2021 20:04:30 GMT+0100 (Centraleuropæisk normaltid)
G91 ; relative positioning
;*** Slow homing has been configured. Change F180 to F1800 below when your configuration is working
G1 H1 X457.7 Y457.7 Z457.7 F1800 ; move all towers to the high end stopping at the endstops (first pass)
G1 H2 X-5 Y-5 Z-5 F1800 ; go down a few mm
;*** Slow homing has been configured. Change F180 to F360 below when your configuration is working
G1 H1 X10 Y10 Z10 F180 ; move all towers up once more (second pass)
G1 Z-5 F6000 ; move down a few mm so that the nozzle can be centred
G90 ; absolute positioning
G1 X0 Y0 F6000 ; move X+Y to the centre
Hope someone can clearify what is going on.
Thanks