@T3P3Tony Right, here it is. Thanks for the help!
; Configuration file for RepRapFirmware on Duet 3 Main Board 6XD
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.5.10 on Tue Feb 25 2025 19:08:55 GMT-0500 (Eastern Standard Time)
; General
G90 ; absolute coordinates
M83 ; relative extruder moves
M550 P"BeltDriveFDM" ; set hostname
M911 S19.8 R22 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
; Network
M552 P0.0.0.0 S1 ; configure Ethernet adapter
M586 P0 S1 ; configure HTTP
; Wait a moment for the CAN expansion boards to become available
G4 S2
; Smart Drivers
M569 P1.0 S1 D2 ; driver 1.0 goes forwards (extruder 0)
; Motor Idle Current Reduction
M906 I30 ; set motor current idle factor
M84 S30 ; set motor current idle timeout
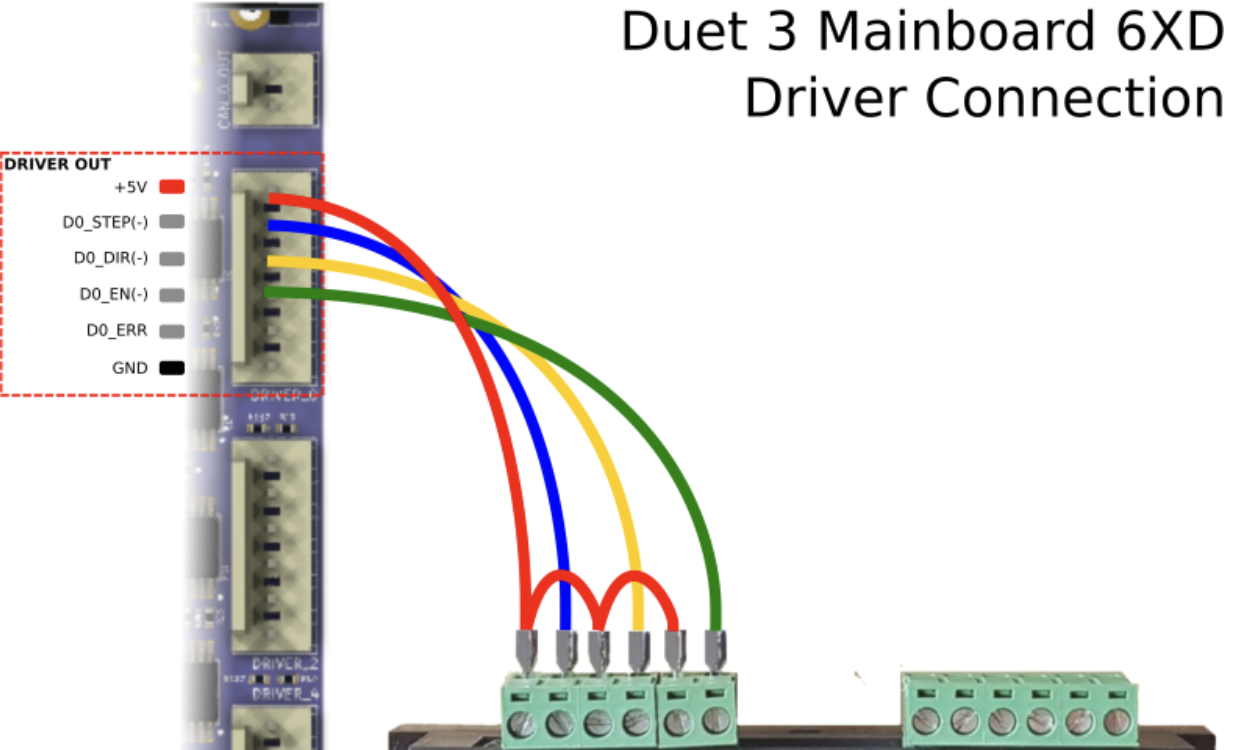
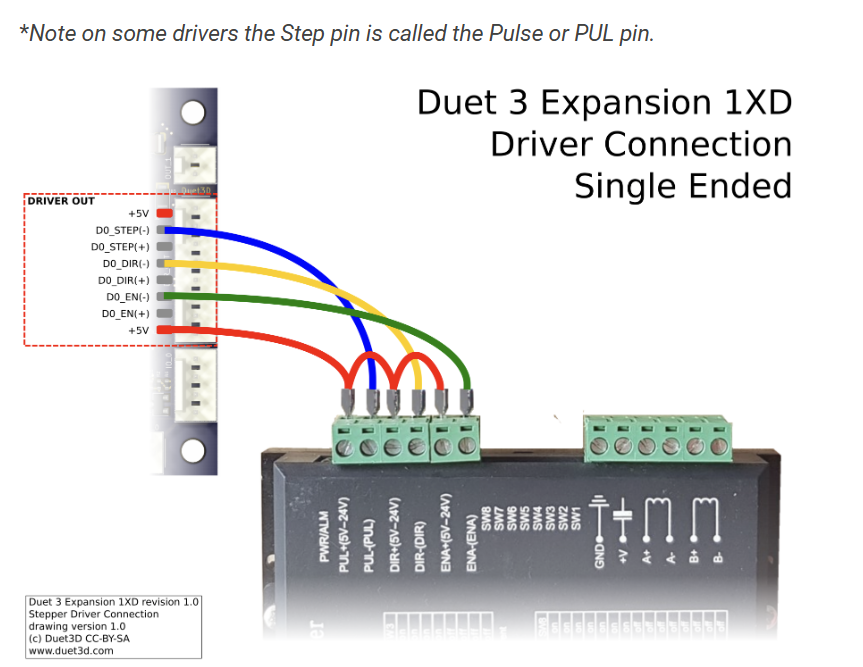
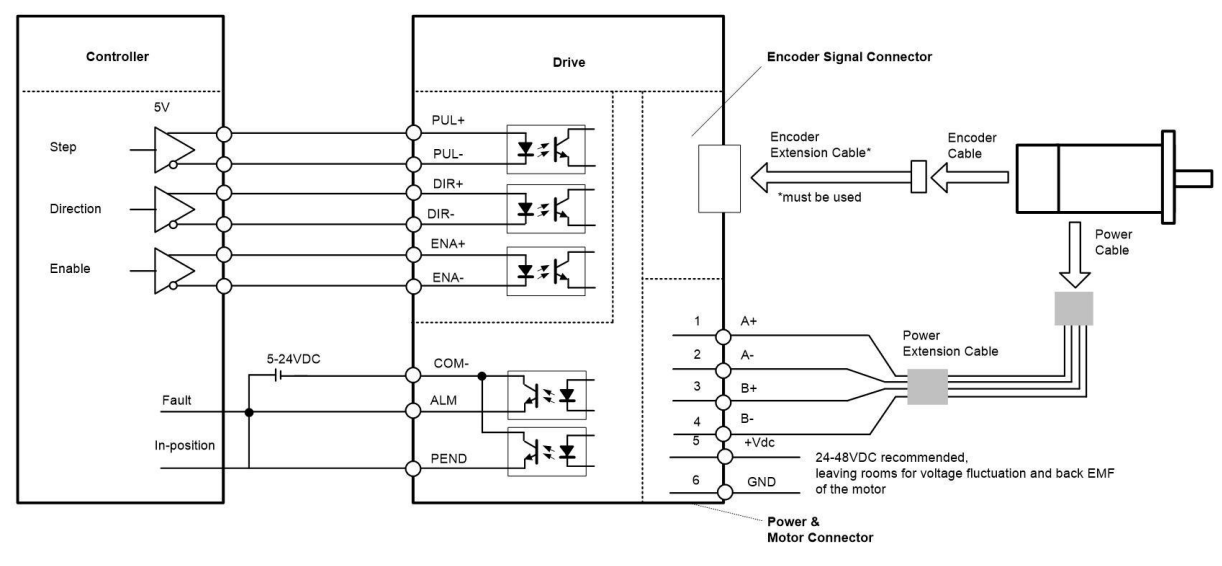
; External Drivers
M569 P0.0 S1 R0 T5:5:10:0 ; driver 0.0 goes forwards and requires an active-low enable signal (X axis)
M569 P0.1 S1 R0 T5:5:10:0 ; driver 0.1 goes forwards and requires an active-low enable signal (Y axis)
M569 P0.2 S1 R0 T5:5:10:0 ; driver 0.2 goes forwards and requires an active-low enable signal (Y axis)
M569 P0.3 S0 R0 T5:5:10:0 ; driver 0.3 goes backwards and requires an active-low enable signal (Z axis)
M569 P0.4 S0 R0 T5:5:10:0 ; driver 0.4 goes backwards and requires an active-low enable signal (Z axis)
M569 P0.5 S0 R0 T5:5:10:0 ; driver 0.5 goes backwards and requires an active-low enable signal (Z axis)
M569 P122.0 S0 R0 T5:5:10:0 ; driver 122.0 goes backwards and requires an active-low enable signal (Z axis)
; Axes
M584 X0.0 Y0.1:0.2 Z0.3:0.4:0.5:122.0 ; set axis mapping
M350 X16 Y16 Z16 I0 ; configure microstepping without interpolation
M92 X80 Y80 Z400 ; configure steps per mm
M208 X0:200 Y0:200 Z0:200 ; set minimum and maximum axis limits
M566 X900 Y900 Z12 ; set maximum instantaneous speed changes (mm/min)
M203 X6000 Y6000 Z366 ; set maximum speeds (mm/min)
M201 X500 Y500 Z20 ; set accelerations (mm/s^2)
; Extruders
M584 E1.0 ; set extruder mapping
M350 E16 I1 ; configure microstepping with interpolation
M906 E1000 ; set extruder driver currents
M92 E420 ; configure steps per mm
M566 E120 ; set maximum instantaneous speed changes (mm/min)
M203 E3600 ; set maximum speeds (mm/min)
M201 E250 ; set accelerations (mm/s^2)
; Kinematics
M669 K0 ; configure Cartesian kinematics
; Probes
M558 K0 P9 C"1.io3.in" H5 F120 T6000 ; configure BLTouch probe via slot #0
G31 P500 X0 Y0 Z0.7 ; set Z probe trigger value, offset and trigger height
M950 S0 C"1.io0.out" ; create servo #0 for BLtouch
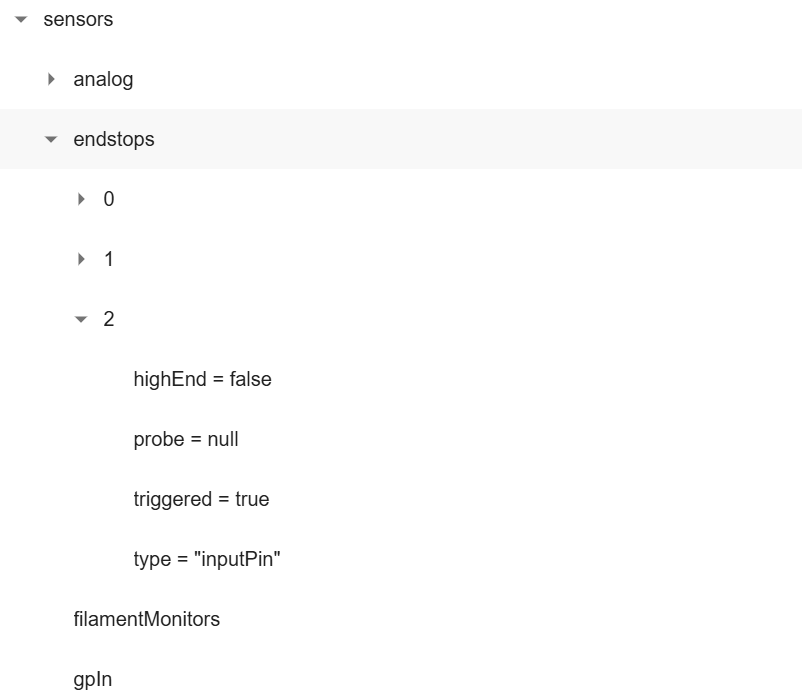
; Endstops
M574 X1 P"io0.in" S1 ; configure X axis endstop
M574 Y1 P"io1.in+io2.in" S1 ; configure Y axis endstop
M574 Z2 P"io3.in+io4.in+io5.in+io6.in" S1 ; configure Z axis endstop
; Sensors
M308 S0 P"temp0" Y"thermistor" A"Heated Bed Z1" T100000 B4725 C7.06e-8 ; configure sensor #0
M308 S1 P"1.temp0" Y"thermistor" A"Nozzle" T100000 B4725 C7.06e-8 ; configure sensor #1
M308 S2 P"temp1" Y"thermistor" A"Heated Bed Z2" T100000 B4725 C7.06e-8 ; configure sensor #2
; Heaters
M950 H0 C"out0" T0 ; create heater #0
M143 H0 P0 T0 C0 S140 A0 ; configure heater monitor #0 for heater #0
M307 H0 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #0
M950 H1 C"1.out0" T1 ; create heater #1
M143 H1 P0 T1 C0 S285 A0 ; configure heater monitor #0 for heater #1
M307 H1 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #1
M950 H2 C"out1" T2 ; create heater #2
M143 H2 P0 T1 C0 S285 A0 ; configure heater monitor #0 for heater #2
M307 H2 R2.43 D5.5 E1.35 K0.56 B0 ; configure model of heater #2
; Heated beds
M140 P0 H0 ; configure heated bed #0
; Fans
M950 F0 C"out3" ; create fan #0
M106 P0 S0 L0 X1 B0.1 ; configure fan #0
M950 F1 C"out4" ; create fan #1
M106 P1 S0 B0.1 H1 T45 ; configure fan #1
; Tools
M563 P0 D0 H1 F0 ; create tool #0
M568 P0 R0 S0 ; set initial tool #0 active and standby temperatures to 0C