Nevermind!
My poor reading skills didn't clock that the Maestro had been grouped with duet 2 wifi + ethernet.
Nevermind!
My poor reading skills didn't clock that the Maestro had been grouped with duet 2 wifi + ethernet.
Long story short I have some ringing.
I've been reading up on DAA and input shaping here:
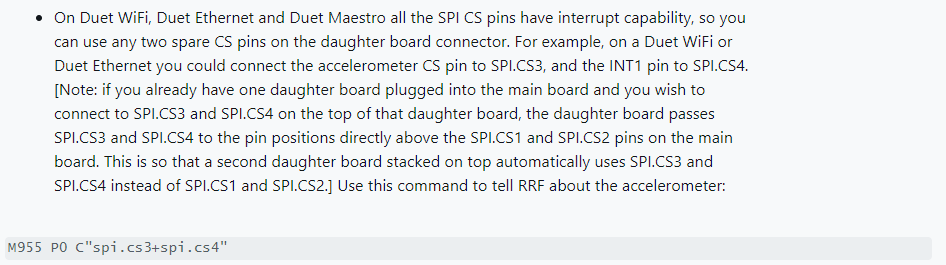
https://duet3d.dozuki.com/Wiki/Accelerometers
https://duet3d.dozuki.com/Wiki/Gcode#Section_M593_Configure_Dynamic_Acceleration_Adjustment
Before I order the LIS3DH accel and redesign a bit of my XY carriage to mount it can someone canfirm or deny if I can use it with a Duet Maestro. My firmware version is 3.2.2 do i just need to upgrade to 3.3?
I couldn't see anywhere where it specifically said it was possible?
Hey, do we have a price range that this is targeting? Will it be similar to the old maestro?
Working out whether to hold out for this or if it will end up out of my price range anyway
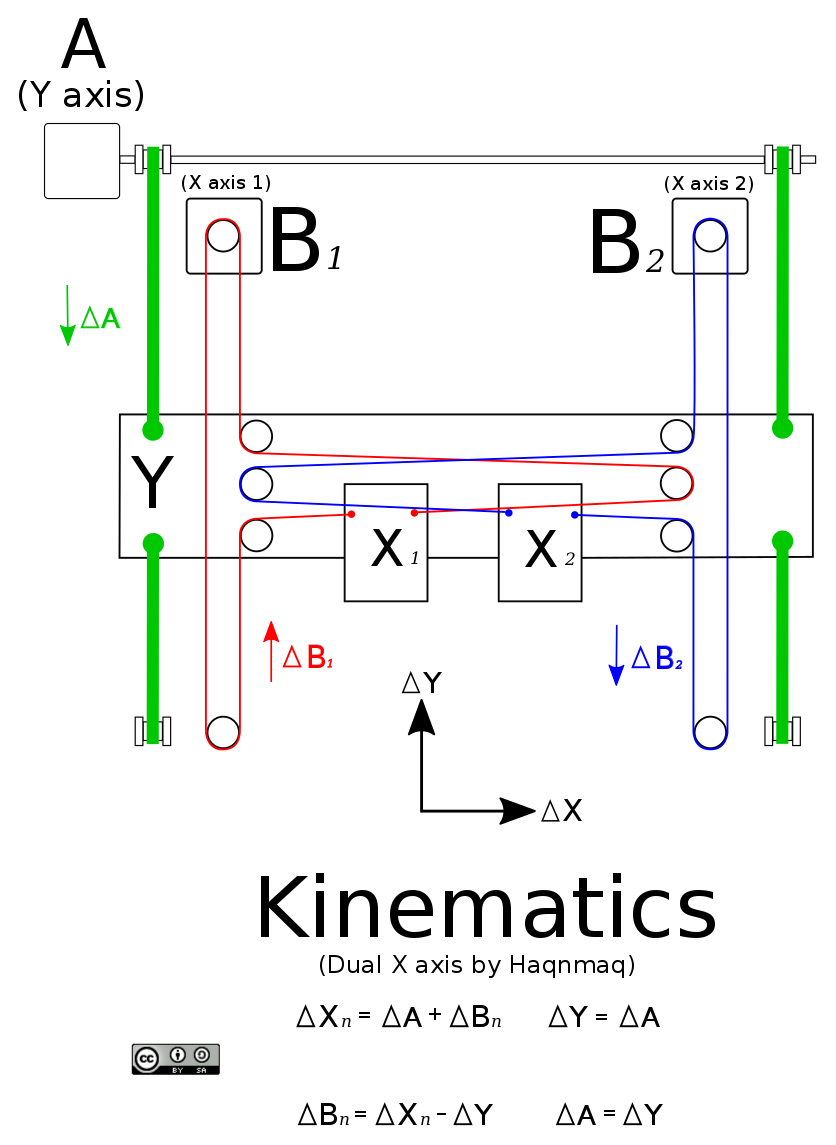
@Haggan90 How did you find the kinematics itself? did you see much of a racking issue? any advice on making the implementation work well or pictures would be appreciated!
I'm torn between this and proper coreXYU with 4 motors
Ahh yeah I understand, it's not truly independent.
@theruttmeister thank you for the feedback. I will need to take some time to process that.
Just one question for now what do you mean by if you didn't need a full idex?
HI,
So i've decided i want to upgrade my current corexy rig to an idex as i'm fed up with the second print nozzle getting in the way etc. when not required but don't want to lose the capability (or have to assemle/re-assemble the nozzle into it when i want to use it!)
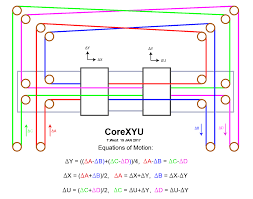
I found this kinematics diagram which i thought would be pretty easy to implement in hardware terms (using mostly my existing parts plus a long steel rod).
Is this the default coreXYU option? or will i need to manually create the M669 command - i had a go at it and i think this correctly represents the kinematic equations?
M669
1.00 1.00 0 0
0 1.00 0 0
0 0 1.00 0
0 1.00 0 1.00;
Hmm - no idea why i had such an old web version! Looks way nicer now about to try a print with a pause to see if it fixed the issue!
Firmware Name: RepRapFirmware for Duet 2 Maestro
Firmware Electronics: Duet Maestro 1.0
Firmware Version: 3.1.1 (2020-05-19b2)
Web Interface Version: 1.22.6
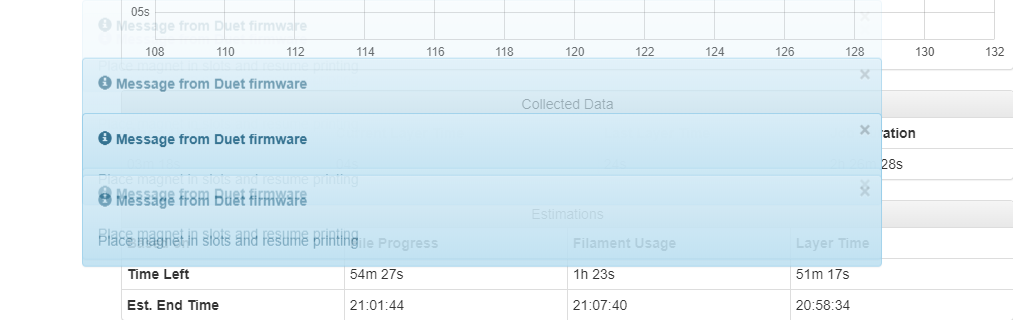
I get these endless message popups once i resume my print after adding a pause in (done use the pause functionality in PrusaSlicer) what am i doing wrong or is it a bug?
M117 "Place magnet in slots and resume printing"
M601
@RyanP said in Pressure Advance: Discussion for Improvement in Bowden Printers:
@Exerqtor said in Pressure Advance: Discussion for Improvement in Bowden Printers:
That's exactly what i ended up doing to (well i setteled on 0.4), even though i would get the most consistent pressure somewhere close to 2, but it sounded like my BMG was one nudge away from exploding at that point
Designed new extruder mounts so i could move the extruders over the build area (corexy machine) and shorten the bowdens down to 300mm ish, so 0.4 isn't that much off.
Answers like this make me not feel alone in the world.
Aye me too... Most calibration things I can see the difference and select a good balance (although often having to run multiple parameter ranges to get a matrix of options - stringing control being a good example here, move speed, retraction length, retraction rate wipe etc.) but this one feels like black magic hah
I ended up just using 0.5 for my PA on my long bowden setup despite all tests indicating more or less no change until 1.5-2 range.
I'm actually getting quite nice results but I was simply limited by what didn't cause the extruder to sound like a machine gun
I'm seeing those blobs and they are annoying, they just don't seem to go. Happens most on solid infil layers and then the nozzle catches them on travel moves
You have much higher extruder accel and a bit higher speeds... i will try it out.
on a side note i tried the hollow cube method... and again i see essentially no difference between the values. i used the M572 command during prints to check and it correctly said extruder 1 was at the values i ran the tests at.


What settings have you got for accel and jerks? i feel like it just doesn't do much with my current setup - i did a 1 wall cal cube and at an S value of 2 i looks ok. about to print another with a value of 1 to see if there is any noticable difference.
here are mine
M584 X0 Y1 Z2 E3:4 ; set drive mapping
M350 X16 Y16 Z16 E16:16 I1 ; configure microstepping with interpolation
M92 X100.00 Y100.00 Z400.00 E420.00:420.00 ; set steps per mm
M566 X1000.00 Y1000.00 Z50.00 E1000.00:1000.00 ; set maximum instantaneous speed changes (mm/min) X900.00 Y900.00 Z12.00 E120.00:120.00
M203 X10000.00 Y10000.00 Z1500.00 E3000.00:3000.00 ; set maximum speeds (mm/min) X6000.00 Y6000.00 Z250.00 E1200.00:1200.00
M201 X500.00 Y500.00 Z100.00 E850.00:850.00 ; set accelerations (mm/s^2) X500.00 Y500.00 Z20.00 E250.00:250.00
Following this as I am struggling with a similar issue right now. I need around a value of 2 based of the same script you did. But in real prints the extruder goes wild especially on solid infills with all the changes of direction.
Hi All,
I've got a 600mm bowden setup with an E3D chimera on the end. I'm trying to calibrate the pressure advance for PLA material and i have run the calibration test script below. (i followed the tutorial that uses the marlin generator then replaces the marlin gcode with the reprapfirmware M572 command).
To me it looks like a value of 2 is best but wow is the extruder going wild during normal prints - especially small areas of solid infil.
Have i done something wrong here?

Is anything under say 80C a safe running zone? With the fan turned off i see the heat distribute right across the board and the expected MCU temp rises. i think for better control i will need to find a way to reposition my fan cooling to avoid the MCU however this is challenging whilst keeping the board in the vertical orientation as suggested to enable regular convection cooling (which i want because it is quieter!)
Hi Guys,
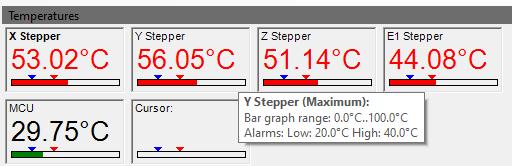
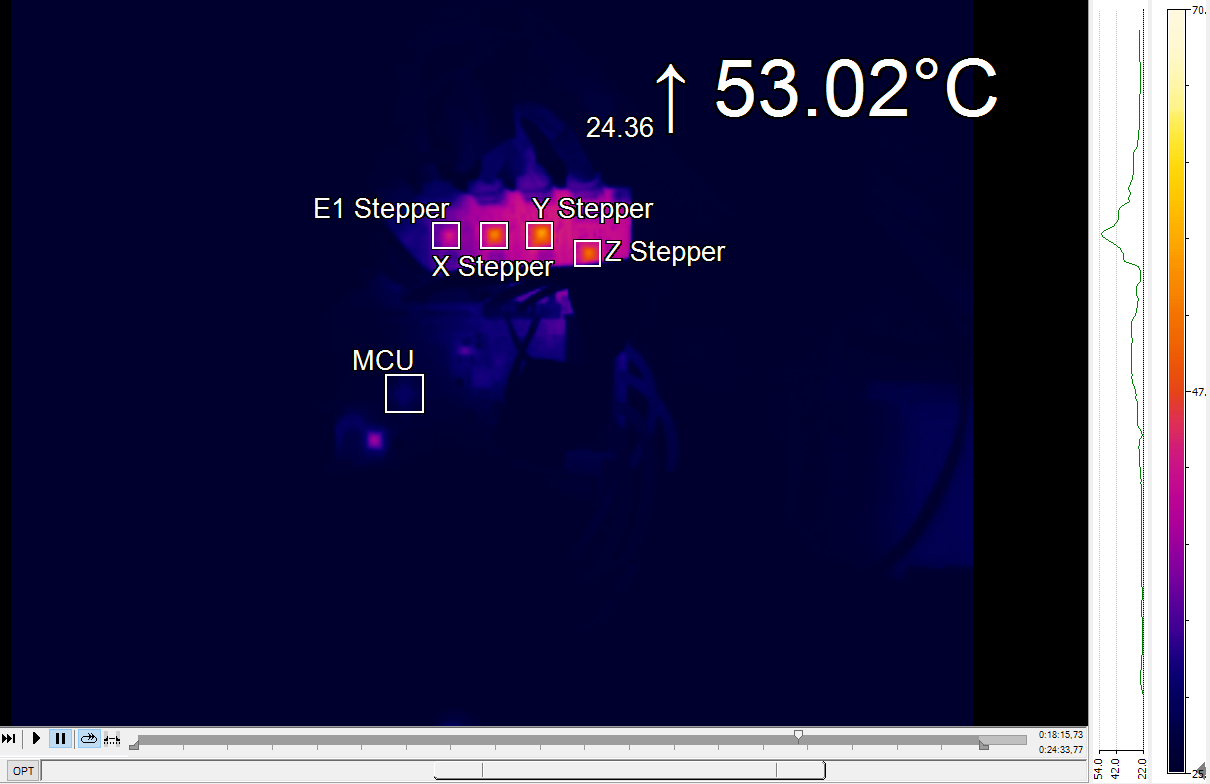
Having purchased a duet Maestro because i had previously been running my steppers at 800ma anyway i thought i'd take a little look into the thermals. I'm lucky enought to have a few thousand pound thermal imaging camera sat on my desk (trialling it for work purposes) and figured i'd use it!
i haven't done too much digging into it yet other than a quick check that all is good. but here are some results - this is with a radial fan, a printed duct straightening the air out so it blows under the region of the board where the steppers are and motors running at 1000ma for the x,y and z and 800ma for the E1.
(this setup is partially calibrated - at room temp before the board is turned on, and after it has been unused overnight, i get almost identical readings to the hot end and heated bed. It is also pretty consistent between the displayed MCU temp and the one recorded using the thermal camera)
I read the alarm temps are over 100C so what is a good operating temp?
Also my MCU temp doesn't change much at all (it is closer to the cooling fan due to available room on machine) so is it really a good indicator for board cooling temps?

p.s. first duet board and i don't think i'll ever go back!
") cheers!
cheers!