@droftarts I think I understand. That's huge help. I'm going to look into some new motors with lower inductance. Thanks for explaining it!
Posts made by Phrayzur
-
RE: Stepper motors grinding, banging and layers shiftingposted in Tuning and tweaking
-
RE: Stepper motors grinding, banging and layers shiftingposted in Tuning and tweaking
@Phaedrux They sound like they've got sand in them.
-
Stepper motors grinding, banging and layers shiftingposted in Tuning and tweaking
I'm using a Duet 3 Mini 5+ board with firmware and DWC version: 3.5.0-rc.2 and Duet WiFi Server: 2.1beta4 on a cartesian frame.
The problem I'm having is my stepper motors are grinding and banging and I'm having probelems with layers shifting. I think it's related to my Creality stepper motor settings. So I was going to start there. They're all Nema 17s. I'm using 2 x 42-40s on my X and Y axis, 1 x 42-40 on my extruder and 2 x 42-34 on my Z axis. I'd link to the datasheet if I knew where to look. I've found so many and there's so much contradiction between them that I didn't know which are applicable and which aren't. So, sorry for that. My printer was originally a CR-10S and that's where the stepper motors came from.
I've spent the last couple of days trying to figure out exactly how to set the values for these motors for Stealthchop, etc. I've hit a wall and have given up sorting it out. On the tuning page, it seems like you need to know what you're looking for already to put the values in. I have no idea what to test for or how to test. I looked at the EMF calculator page but I couldn't tell you what to do with those values or what they represent.
I have to be honest. I really like not having to flash the firmware everytime I'd like to make a change, but I'm hitting so many walls when it comes to configuring this board that it's beyond frustrating. The major problem I have is that most of the guides/instructions/discussions I can find are full of non-standard terms, acronyms, slang and written with an assumption of a very high level of knowledge. I'm finding it impossible to sort out things out without a herculean effort. The basic instructions are great, but I found I was out of my depth really quickly.
Here's my config.g:
; Configuration file for RepRapFirmware on Duet 3 Mini 5+ WiFi ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.5.0-rc.2+1 on Fri Jan 05 2024 09:31:31 GMT-0600 (Central Standard Time) ; General M550 P"CR-10S Duet 3 Mini 5+" ; set hostname ; Accessories M575 P1 S0 B57600 ; configure PanelDue support ; Network M552 S1 ; configure WiFi adapter M586 P0 S1 ; configure HTTP ; Smart Drivers M569 P0.0 S1 D3 V91 ; driver 0.0 goes forwards (X axis) M569 P0.1 S0 D3 V91 ; driver 0.1 goes backwards (Y axis) M569 P0.2 S1 D3 V18 ; driver 0.2 goes forwards (Z axis) M569 P0.3 S1 D3 V18 ; driver 0.3 goes forwards (Z axis) M569 P0.4 S0 D3 V75 ; driver 0.4 goes backwards (extruder 0) ; Motor Idle Current Reduction M906 I30 ; set motor current idle factor M84 S30 ; set motor current idle timeout ; Axes M584 X0.0 Y0.1 Z0.2:0.3 ; set axis mapping M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M906 X800 Y800 Z800 ; set axis driver currents M92 X80.91 Y80 Z403 ; configure steps per mm M208 X0:303 Y0:300 Z0:370 ; set minimum and maximum axis limits M566 X480 Y480 Z144 ; set maximum instantaneous speed changes (mm/min) M203 X12000 Y12000 Z1200 ; set maximum speeds (mm/min) M201 X1000 Y1000 Z100 ; set accelerations (mm/s^2) ; Extruders M584 E0.4 ; set extruder mapping M350 E16 I1 ; configure microstepping with interpolation M906 E800 ; set extruder driver currents M92 E403.841 ; configure steps per mm M566 E300 ; set maximum instantaneous speed changes (mm/min) M203 E3000 ; set maximum speeds (mm/min) M201 E5000 ; set accelerations (mm/s^2) ; Kinematics M669 K0 ; configure Cartesian kinematics ; Probes M558 K0 P9 C"io3.in" H5 F1500:60 T6000 R0.1 A30 S0.01 ; configure BLTouch probe via slot #0 M950 S0 C"io3.out" ; create servo #0 for BLtouch G31 K0 P25 X46.3 Y7.8 Z2.027 ; Z probe parameters ; Endstops M574 X1 P"io5.in" S1 ; configure X axis endstop M574 Y1 P"io6.in" S1 ; configure Y axis endstop M574 Z1 S2 ; configure Z axis endstop ; Mesh Bed Compensation ; These coordinates are the probe locations. Not the hotend. Just tell it where you want it to probe M557 X46.5:302 Y7.68:299 P8:8 ; Sensors M308 S0 P"temp0" Y"thermistor" A"Bed Temp" T91785 B4571 ; configure sensor 0 as thermistor on pin temp0 M308 S1 P"temp1" Y"thermistor" A"Hotend Temp" T90904 B4505 C5.391309e-9 ; configure sensor #1 ; Heaters M950 H0 C"out0" T0 ; create Bed Heater #0 M143 H0 P0 T0 C0 S120 A0 ; configure monitor #0 for Bed Heater #0 M307 H0 R0.101 K0.178:0.000 D0.46 E1.35 S1.00 B0 ; configure model of Bed Heater #0 M950 H1 C"out1" T1 ; create Hotend Heater #1 M143 H1 P0 T1 C0 S280 A0 ; configure monitor #0 for Hotend Heater #1 M307 H1 R1.181 K0.290:0.005 D6.74 E1.35 S1.00 B0 V11.6 ; configure model of Hotend Heater #1 ; Heated beds M140 P0 H0 ; configure heated bed #0 ; Fans M950 F0 C"out3" Q100 ; create Part Cooling Fan on pin out3 and set its frequency M106 P0 C"Part Cooling Fan" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off M950 F1 C"out4" ; create Hotend Fan on pin out4 and set its frequency M106 P1 C"Hotend Fan" S1 H1:0 T45 ; set Hotend Fan name and value. Thermostatic control is turned on M950 F2 C"out5" ; create Case Fan on pin out5 and set its frequency M106 P2 C"Case Fan" S1 H-1 ; set Case Fan name and value. Thermostatic control is turned off ; Tools M563 P0 S"V6 Volcano" D0 H1 F0 ; create tool #0 M568 P0 R0 S0 ; set initial tool #0 active and standby temperatures to 0C ; Miscellaneous G29 S1 ; load heightmap.csv M501 ; load saved parameters from non-volatile memory T0 ; select first tool ; Custom settings M280 P0 S160 ; Alarm Release and Push-Pin UP```And here's my config-override.g:
; config-override.g file generated in response to M500 at 2024-01-27 13:57 ; This is a system-generated file - do not edit ; Heater model parameters M307 H0 R0.101 K0.178:0.000 D0.46 E1.35 S1.00 B0 M307 H1 R1.181 K0.290:0.005 D6.74 E1.35 S1.00 B0 V11.6 ; Z probe parameters G31 K0 P25 X46.3 Y7.8 Z2.027 ; Workplace coordinates G10 L2 P1 X0.00 Y0.00 Z0.00 G10 L2 P2 X0.00 Y0.00 Z0.00 G10 L2 P3 X0.00 Y0.00 Z0.00 G10 L2 P4 X0.00 Y0.00 Z0.00 G10 L2 P5 X0.00 Y0.00 Z0.00 G10 L2 P6 X0.00 Y0.00 Z0.00 G10 L2 P7 X0.00 Y0.00 Z0.00 G10 L2 P8 X0.00 Y0.00 Z0.00 G10 L2 P9 X0.00 Y0.00 Z0.00Any help you can offer would be greatly appreciated.
-
RE: Need some guidance on pausing a macro until I provide inputposted in Gcode meta commands
@OwenD said in Need some guidance on pausing a macro until I provide input:
M291 R"Wait" P"Check bed height. Press OK to continue" K{"OK","Abort"} S4if (input == 1) echo " cancelled" M99
Thanks so much! I'm using firmware version 3.46 (I'm not aware if 3.5 is stable enough), so I had to change it a little bit. I couldn't go higher than S3 and it wouldn't accept the "input" value. I ended up using the following:
G1 H2 X30 Y30 F6000M291 R"Wait" P"This is a pause. Press OK to continue" K{"OK","Abort"} S3G1 H2 X50 Y50 F6000This works great so far! Thank you again!
-
Need some guidance on pausing a macro until I provide inputposted in Gcode meta commands
I've got to be missing something. I'm trying to run the following example code:
G1 H2 X30 Y30 F6000; insert macro pause here
M25G1 H2 X50 Y50 F6000However, it always returns "Error: Cannot pause print, because no file is being printed!"
I'm not printing anything. I'm just putting a macro together to level my bed and need to pause so I can check the bed height. After I've done that I'd like to continue the macro by clicking resume (or something similar). I've tried M226 as well and, although I didn't receive an error, it didn't have any effect. I'm unable to use G4 because I don't know the duration of the pause.
Any guidance would be appreciated.
-
RE: Relative movement without using G90 and G91posted in Gcode meta commands
@dc42 You are absolutely correct! I don't know why I thought otherwise. Thanks!
-
Relative movement without using G90 and G91posted in Gcode meta commands
I'm using some nested macros and I'm having issues where, when I'm in relative movment mode, the machine returns to absolute movement becaue I've called a macro that has the G90 command. I'm wondering if it's possible to issue a single relative movement command (eg. G1 Z20) in absolute movement mode without using G90 and G91. Alternatively, is it possible to set the value of inputs[0].axesRelative to a variable value like set inputs[0].axesRelative = {RelativeMoveVar}?
I've tried using M120 and M121 but it also affects feedrate and hotend position.
-
RE: X, Y, Z Endstops intermittent connectionposted in Duet Hardware and wiring
@infiniteloop Thanks! Let me play around with this for a bit and see if the problems fixed. So far the X axis isn't rapidly switching...
-
RE: X, Y, Z Endstops intermittent connectionposted in Duet Hardware and wiring
@infiniteloop I really appreciate the help. Thank you.
Here's the photo...

The improper axis movement does still happen. I believe what it is is when homing the axis, it initially doesn't check to see if the endstop is triggered and moves away from the home position. Then, after moving away, it checks the endstop trigger and if it's registering as triggered then it stops where it is.
It seems like all the problems happen much more frequently with the X axis then about half as much with the Y axis and only occasionally with the Z axis.
-
RE: X, Y, Z Endstops intermittent connectionposted in Duet Hardware and wiring
@infiniteloop Here's the config.g file.
; Configuration file for Duet 3 Mini 5+ (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.10 on Wed Jun 15 2022 10:13:35 GMT-0600 (Central Standard Time) ; General preferences G90 ; send absolute coordinates... - ORIGINAL M83 ; ...but relative extruder moves - ORIGINAL M550 P"CR-10s Duet 3 Mini 5+" ; set printer name - ORIGINAL M918 P1 E4 F2000000 ; configure direct-connect display - ORIGINAL ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ;Drives M569 P0.0 D3 V91 S1 ; physical drive 0.0 goes forwards M569 P0.1 D3 V91 S0 ; physical drive 0.1 goes forwards M569 P0.2 D3 V18 S1 ; physical drive 0.2 goes backwards M569 P0.3 D3 V18 S1 ; physical drive 0.3 goes backwards M569 P0.4 D3 V75 S0 ; physical drive 0.4 goes forwards M584 X0.0 Y0.1 Z0.2:0.3 E0.4 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation - ORIGINAL M92 X80.00 Y80.00 Z400.00 E400.00 ; set steps per mm - ORIGINAL ; M566 X480.00 Y480.00 Z144.00 E300.00 ; set maximum instantaneous speed changes (mm/min) - ORIGINAL M566 X480.00 Y360.00 Z144.00 E300.00 ; set maximum instantaneous speed changes (mm/min) M203 X12000.00 Y12000.00 Z1200.00 E3000.00 ; set maximum speeds (mm/min) - ORIGINAL ; M201 X1000.00 Y1000.00 Z100.00 E5000.00 ; set accelerations (mm/s^2) - ORIGINAL M201 X1000.00 Y600.00 Z100.00 E5000.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent - ORIGINAL M84 S30 ; Set idle timeout - ORIGINAL ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima - ORIGINAL M208 X290 Y298 Z380 S0 ; set axis maxima - ORIGINAL ; Endstops M574 X1 S1 P"io5.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin io5.in M574 Y1 S1 P"io6.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io6.in M574 Z1 S1 P"io2.in" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin io2.in ; ; Z-Probe ; M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed - ORIGINAL ; M557 X15:215 Y15:195 S20 ; define mesh grid - ORIGINAL ; Bed Heater M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0 - ORIGINAL M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 - ORIGINAL ; M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit - ORIGINAL M307 H0 R0.154 K0.181:0.000 D0.69 E1.35 S1.00 B0 V12.1; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 - ORIGINAL M143 H0 S120 ; set temperature limit for heater 0 to 120C - ORIGINAL ; Hotend Heater ; M308 S1 P"temp1" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin temp1 - ORIGINAL M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out1" T1 ; create hotend heater output on out1 and map it to sensor 1 - ORIGINAL ; M307 H1 B0 S1.00 ; disable bang-bang mode for hotend heater and set PWM limit - ORIGINAL M307 H1 R1.293 K0.255:0.000 D6.03 E1.35 S1.00 B0 V12.1 ; disable bang-bang mode for hotend heater and set PWM limit M143 H1 S285 ; set temperature limit for hotend heater 1 to 285C - ORIGINAL ; Fans M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency - ORIGINAL ; M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off - ORIGINAL M106 P0 C"Part Cooling Fan" S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency - ORIGINAL ; M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on - ORIGINAL M106 P1 C"Hotend Fan" S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"out5" Q500 ; create fan 2 on pin out5 and set its frequency - ORIGINAL ; M106 P2 S1 H-1 ; set fan 2 value. Thermostatic control is turned off - ORIGINAL M106 P2 C"CaseFan" S1 H-1 ; set fan 2 name and value. Thermostatic control is turned off ; Tools M563 P0 S"V6 Volcano" D0 H1 F0 ; define tool 0 - ORIGINAL ; G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets - ORIGINAL G10 P0 X0 Y5 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C - ORIGINALI'm sorry about the lack of understanding of the terminology. Electrical isn't my forte
")
-
RE: X, Y, Z Endstops intermittent connectionposted in Duet Hardware and wiring
The wiring is the stock Creality CR-10s wiring. It worked fine until I set up the new board. I've tested it all for continuity and there's no problem with that.
I hate to admit it, but I really don't understand enough to figure out the rest of your message.
What would the best way to upload my config.g?
-
RE: X, Y, Z Endstops intermittent connectionposted in Duet Hardware and wiring
@fcwilt I don't know what the brand is for the endstops but they're the stock Creality CR-10s ones. Here's a picture.
 They're connected through the original Creality wiring. I've tested with different endstops from another printer that's working. Same issues.
They're connected through the original Creality wiring. I've tested with different endstops from another printer that's working. Same issues. -
X, Y, Z Endstops intermittent connectionposted in Duet Hardware and wiring
I've got a Duet 3 Mini 5 with the firmware etc.: FIRMWARE_NAME: RepRapFirmware for Duet 3 Mini 5+ FIRMWARE_VERSION: 3.4.1 ELECTRONICS: Duet 3 Mini5plus WiFi FIRMWARE_DATE: 2022-06-01 21:07:06. This board is running a Creality CR-10s printer. It's stock except for a E3D V6 Volcano.
I'm having a problem with the X, Y, and Z endstops working intermittently. I was having problems with homing initially. At times the hotend wouldn't move in the home direction. It would simply move further along the axis away from home. And then it wouldn't. I'm using your "Endstops Monitor" plugin. It shows the X axis flickering as homed on and off randomly. Probably 1 or 2 times every second or 2. The Y axis is doing the same thing but not as frequently. And the Z axis is even less frequent.
I've tested all the wiring and the endstops themselves. I've tried different wiring and different endstops. I did notice that, for a while, the X axis endstop was doing the same thing without anything connected to the boards X endstop connector. And then, after awhile, it didn't.
I can't print with the hardware in this state. It's too unreliable. I'm out of ideas and beyond frustrated at this point.
I'm not sure if this is specifically where I look for support from Duet3D, but I figure it's as good a place as any. I'm really hoping it's more helpful than their documentation.
-
RE: Bed PID tuning and M307 settingsposted in Firmware installation
@aurimas I've been having the same problem... Check this post out...
https://forum.duet3d.com/topic/28218/cr-10s-heated-bed-error-temp-rising-too-slowly
-
RE: CR-10s Heated Bed Error: Temp rising too slowlyposted in Tuning and tweaking
@phaedrux I really appreciate your help with this... Thank you!
I haven't received the heating too slowly error since I tried tuning again. I added a basic PID value before I ran it. I think that made the difference.
When I say it's heating really slowly, apart from the error, I mean complared to the same printer with the original main board. It's the stock heater bed.
I'm running a tuning cycle right now. I'm including the screen cap of the process during Phase 3
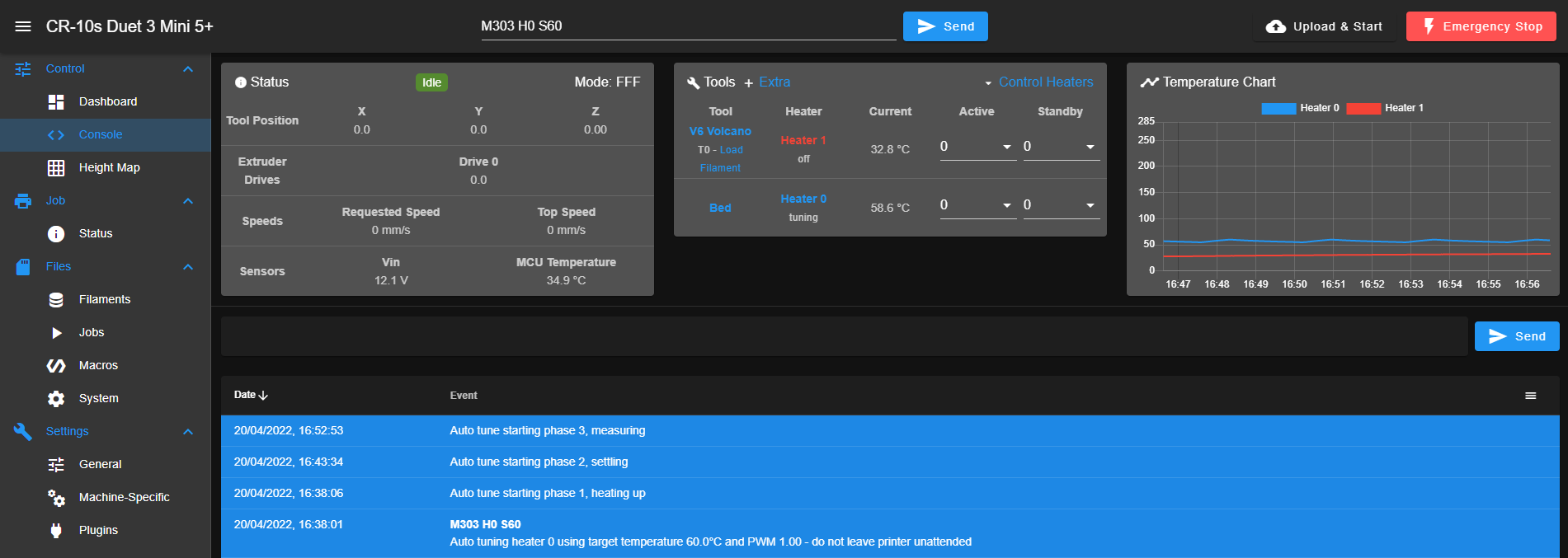 at 19 mins in.
at 19 mins in. -
RE: CR-10s Heated Bed Error: Temp rising too slowlyposted in Tuning and tweaking
@phaedrux I appreciate the advice, but I've tried a couple of time to run "M303 H0 S60" a few times. I even left it running over night. It just never finishes. I know I've got 12v to the bed and when I run "M303 H0 S60" the bed gets hot and the thermistor registers the correct temperature. I have no idea how to get it to finish.
Any other suggestions? Or maybe you know where I could get a preconfigured config for a CR-10s?
-
CR-10s Heated Bed Error: Temp rising too slowlyposted in Tuning and tweaking
I've replaced the main board in my CR-10s with the Duet 3 Mini 5+.
I'm having a hell of a time configuring this thing. I've been at it for over a month without extruding a mm of filament. Most of the info I can find is either incomplete, isn't informative about my hardware, contradictory or assumes intimate knowledge of all of the variations of RepRap gcode. I'm beyond frustrated so excuse me if I come across as annoyed...
My latest in a string of difficulties is that when I try to heat the bed to 55c I get the following error:
"Error: Heater 0 fault: temperature rising too slowly: expected 2.31°C/sec measured 0.18°C/sec"It's always some variation of that. I'll include my latest config.g file.
I'm really hoping someone can help me. I really just want to use this paperweight...
[Edit] I should mention that I've tried tuning the bed heater with "M303 H0 S60" but it wouldn't procede past "Auto tune starting phase 3, measuring". I left it on all night. There were no errors or anything. It just sat there. I powered it off and on and everything seemed the same.