@T3P3Tony Whoa my apologies. I just assumed it extended.
Posts made by markz
-
RE: Stop during stepper motor operationposted in Gcode meta commands
-
RE: Stop during stepper motor operationposted in Gcode meta commands
@Dennis_kim The simplest approach is to define the stepper motor as a spindle and then you can set the spindle to a specific speed (and cw or ccw). On my CNC (a Duet3d 6xd) I use the fan2 port because I'm driving a relay, but the 6HC will drive a stepper just fine. The following code sets up the spindle (yours will differ).
; Spindle definition M950 R0 C"out7" L1000 ; use the fan2 port for spindle, M563 P0 S"Spindle 0" R0 ; create a spindle #0 named spindle 0Then, in CNC mode the user interface will add a spindle control like this:

and check out the M3, M4, and M5 GCode commands. Also, see here: https://docs.duet3d.com/en/User_manual/Machine_configuration/Configuration_CNC
-
RE: Software for Duet3 6XDposted in CNC
@jimakron The Duet3d boards all support RRF (rep-rap firmware) - which comes free with the board. This is similar to Mach3 with a web-based user interface. All of the g-code processing is done on the 6XD internal processor. See https://docs.duet3d.com/en/User_manual/Reference/Gcodes
-
RE: Building a CNC Pendantposted in CNC
For anyone who's interested in building/using one of these, the documentation, source, schematics, ... is in On Github
The schematic+pcb+bom is designed for Jlcpcb using their EasyEda application so it's trivial (one click) to have one built.
The current state is: the unit works effectively, the Pico has a tiny Wifi antenna so a nearby router is a good thing, and MicroPython for the Pico W is still beta so the wifi code uses blocking I/O which can be a bit laggy.
I also haven't yet written the extra wifi support for Duet3d SBC since only my printer uses that.
-
RE: Changed ISPposted in General Discussion
@Exerqtor Huh, thanks. I took a look and in their usual clever fashion they display the m550 name but elide the space when setting the hostname.
-
RE: Changed ISPposted in General Discussion
@Dizzwold Generally you can't set a computer name with a space character in it. Have you tried using M550 P"Duet3" ?
Also I'm confused by that .xxx - are you not showing it? That needs to be number like @Exerqtor shows.
-
RE: table router with Duet 2 wifiposted in CNC
@an-andrew If I understand this your fence is two boards that might move independently - like the two ends of a jointer - but on their side. If so...
I would probably define the fence as an axis with both motors. Then, RRF Gcode supports G1 H2 which moves an individual motor and you could fairly easily change the dashboard source or add a custom button screen (see https://plugins.duet3d.com/plugins/BtnCmd.html) that does conventional G1 moves along with G1 H2 for that second half of the fence.
-
RE: Changed ISPposted in General Discussion
@Dizzwold Your subnet mask means the router will only use 192.168.0.xxx and you won't see anything at 192.168.1.xxx.
Here's what I would do.
Keep the router IP address and subnet mask as is
Starting IP Adddress -> 192.168.0.50
Ending IP Address -> 192.168.0.254Set the Duet address to 192.168.0.25 (or anything between 2 and 49)
You may need to restart any other devices on your network to ensure they move to the new router available dynamic address range.
-
RE: table router with Duet 2 wifiposted in CNC
@an-andrew I'm not sure I understand what you are doing.
How many motors are there? Is there one motor for Z and two motors for the fence?
Do you want to drive Y independently in order to angle the fence but usually will run the two (X,Y) motors to move the fence parallel?
-
RE: Changed ISPposted in General Discussion
@Dizzwold Generally you don't want a static address between start and end or your router might assign it to a different device dynamically. So, use the same subnet but start after or before the static address.
So, my router uses 192.168.0.xxx subnet and I reserve the <100 folks for static addresses and the >100 for dynamic. I let it deliver 192.168.0.100-192.168.0.250 dynamically.
-
RE: Building a CNC Pendantposted in CNC
Here's a pointer to a Youtube video showing a very very very early demo.
Update:: I connected the CNC (a 6XD) direct to ethernet instead of a wonky forwarder and slightly tweaked the code and it's looking way better for lag.

-
RE: Building a CNC Pendantposted in CNC
@Sindarius @jay_s_uk If you could msg me mailing addresses I'll send them out. I have at least 3 spares. If you want the ones with the improved, maybe correct, mounting holes they rate to take about 3 weeks to get here.
-
RE: Building a CNC Pendantposted in CNC
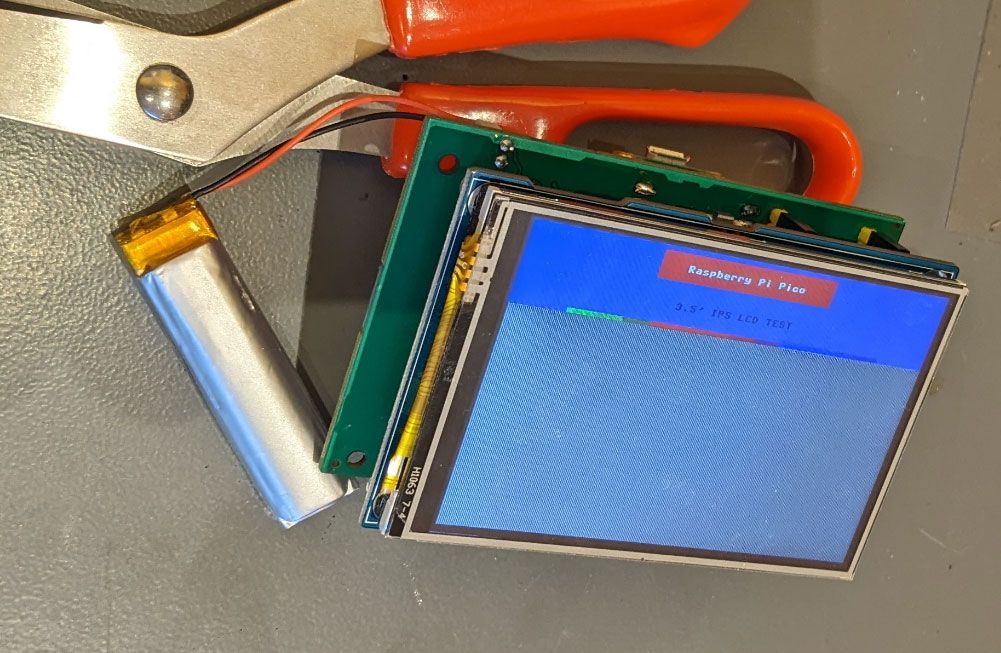
@T3P3Tony At the moment I'm using the MicroPython Pico W daily build and it's working very reliably, though there's some strangeness with the dual core management. It currently is drawing that sample image and hosting web pages as a test of the wifi. The only concern I have is that it's approaching the 2MB flash limit with most of the core code done.
All of the ports are tested and working and I've ordered new boards that hopefully have the holes correctly seated although I don't really care that much since the enclosure can correct that so now I'm working on the software. This would take just a few days if I didn't have other things to do.
If you guys want a few of the boards I won't be using them all.
-
RE: Building a CNC Pendantposted in CNC
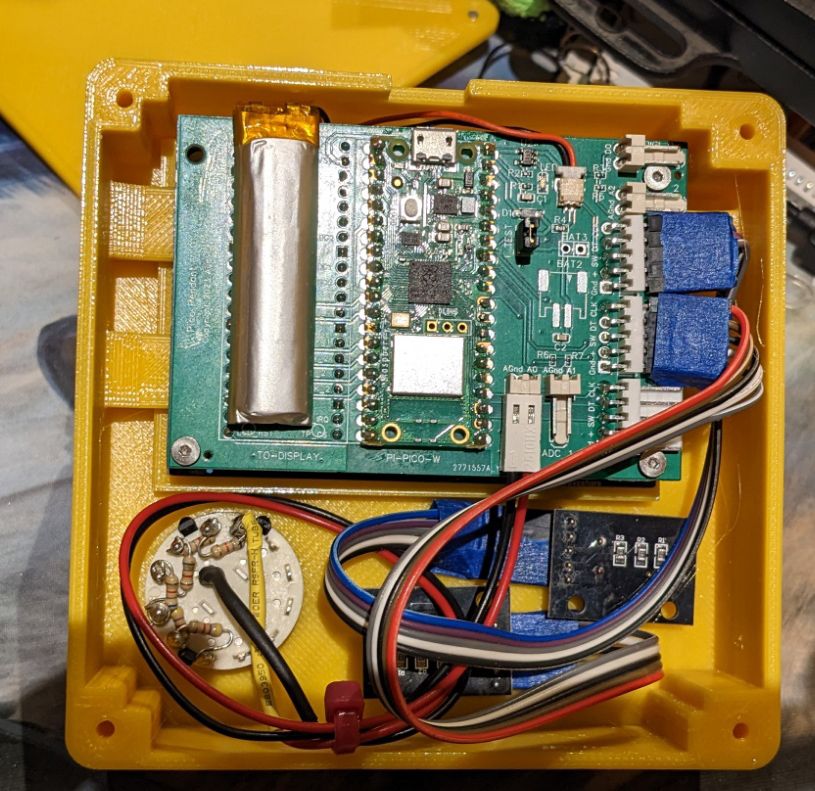
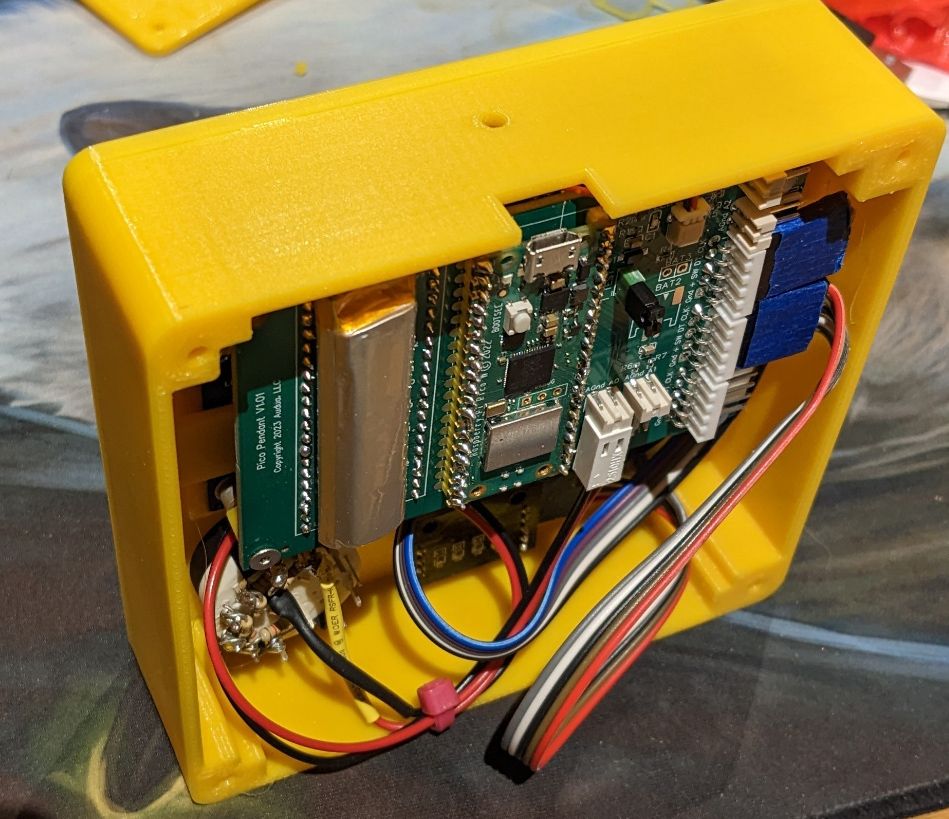
The first batch has shown up and I've adequately (good word) soldered the ic socket left. The center I've stuck a real plugin socket for testing (not shown). The mounting holes need to be moved left about 2.5mm but otherwise so far so good. I deliberately don't populate BAT2 or BAT3.
Strangely I've found out that my port-switchable USB hub apparently doesn't turn off the data lines since, with battery, this communicates with my PC USB even with the port off
 That's a useful feature for testing but still...
That's a useful feature for testing but still...
-
Building a CNC Pendantposted in CNC
I guess I have too much time on my hands because I'm designing and building a CNC pendant. I have three Duet3d-based systems in-house (a CNC, a 3d printer, a milling machine) and I really need a portable pendant.
Now that it's nearly finished I thought it might be time for some feedback
")
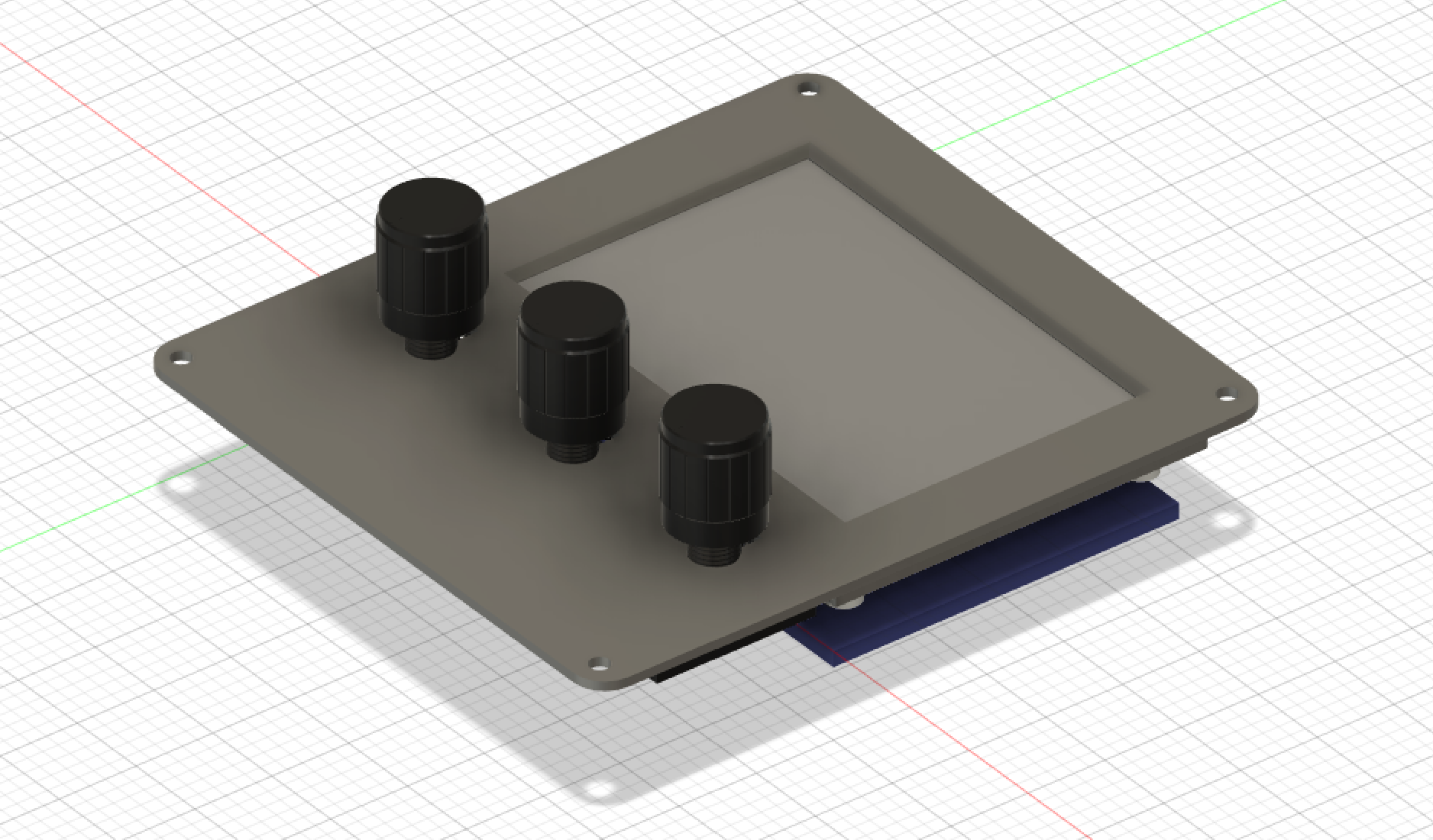
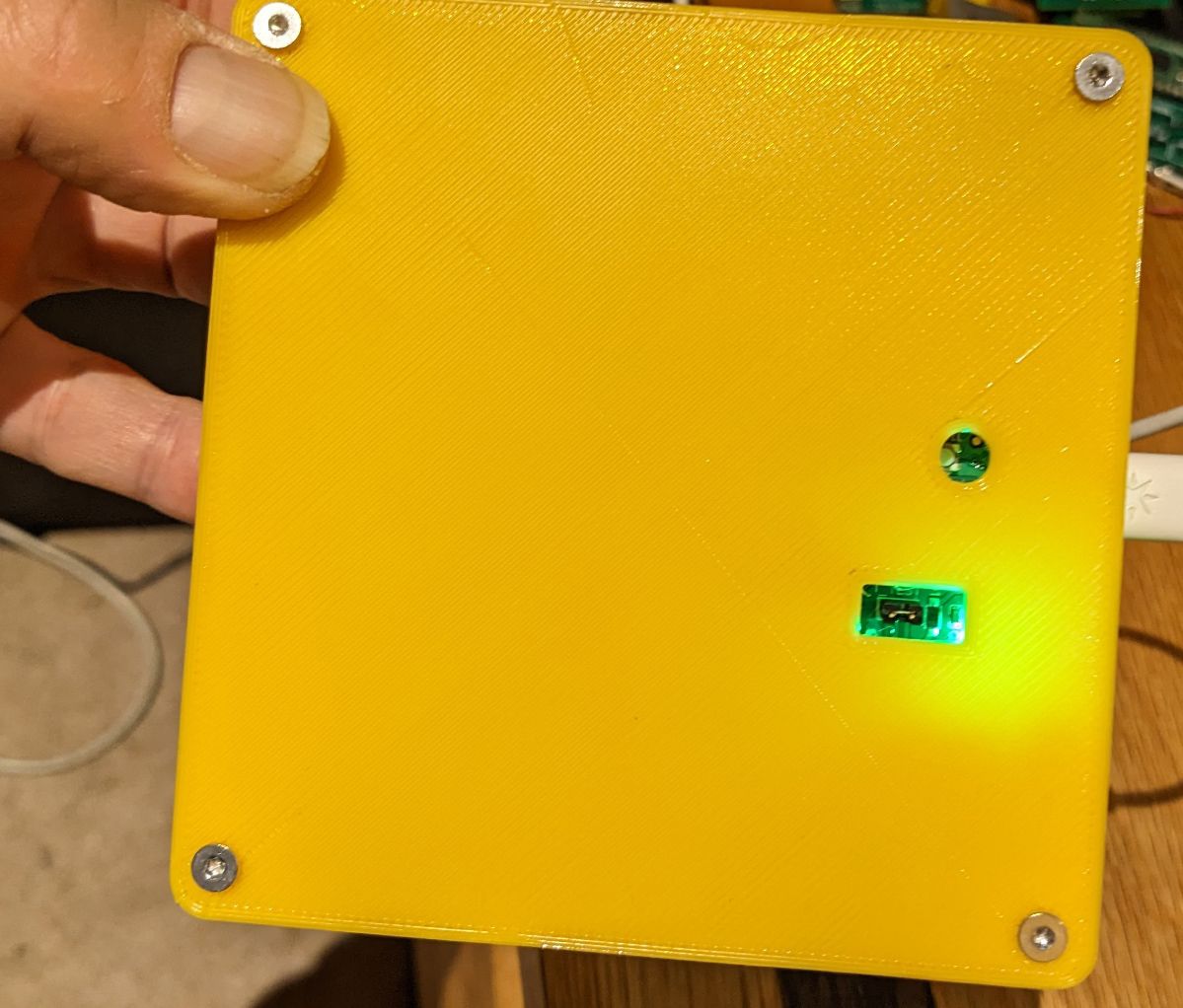
Here's a quick view of what I'm building.
The case is 3d printed so pretty malleable. Each grid box is 1/2" (sorry not-metric) so the case is about 3.5"x4"x2".
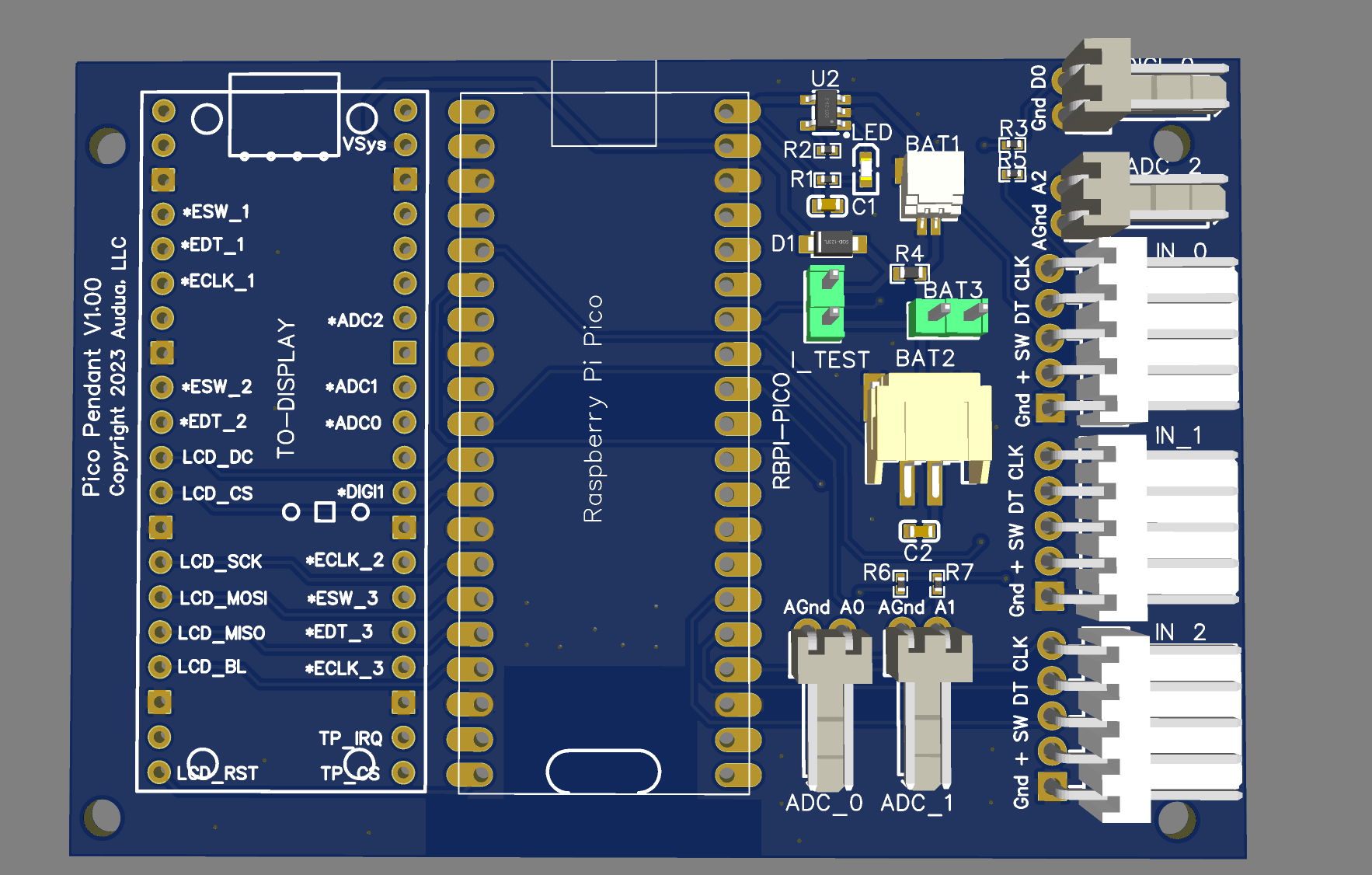
Here's a quick view of the board (V1.00).
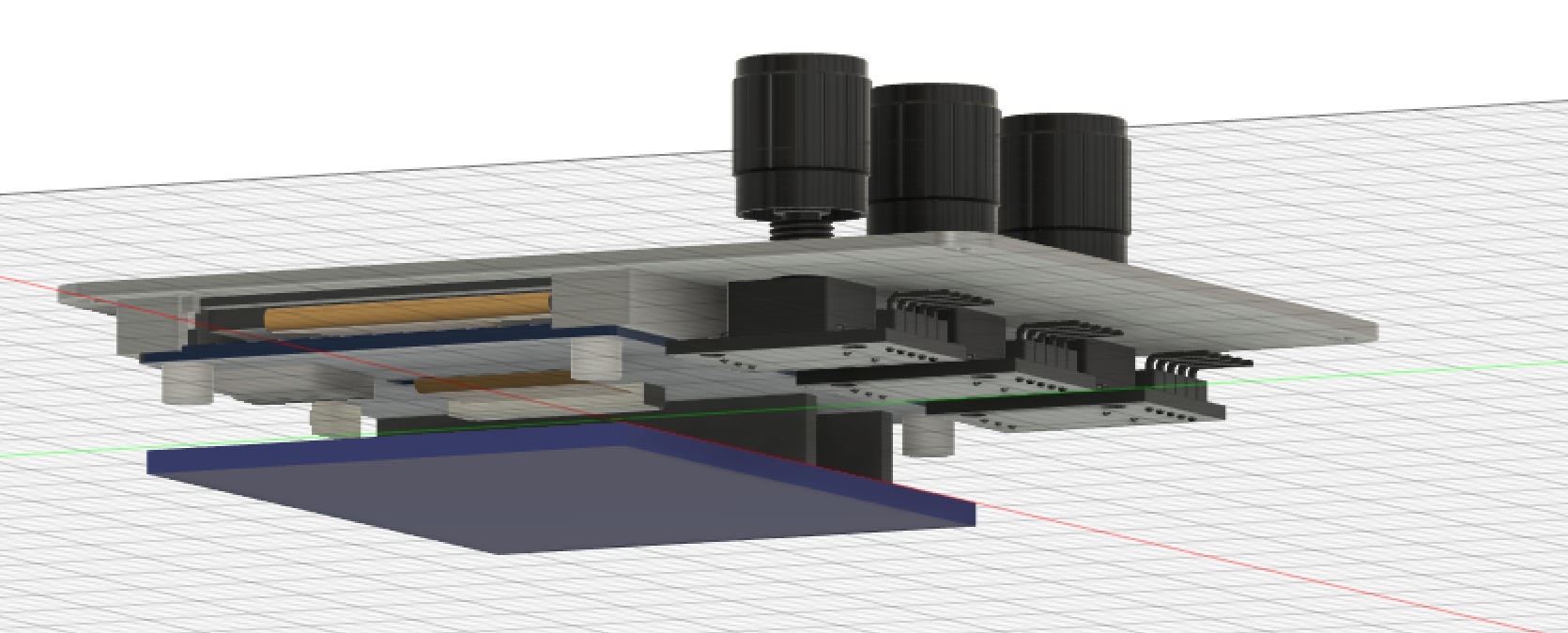
The board is designed to fit onto this 3.5" touchscreen display -> https://www.waveshare.com/wiki/Pico-ResTouch-LCD-3.5 but it should work with most any display, just not as well-mounted. The carrier board holes fit the display.
The WaveShare display has a socket for a Raspberry Pi Pico. The carrier board has two Pico 'sockets'. The center socket is to flush-mount or pin-mount a Raspberry Pi Pico W, the other just has pins mounted for the display board.
There is a LiPo battery charger and voltage source circuit, as well as 7 input sockets: 1 digital input, 3 analog inputs (for potentiometers or ladder switches), and 3 multi-inputs for standard arduino rotary encoders or just usable as 3 digital i/o's per input. There are three different optional battery connectors in parallel - a 1mm JST, a 2mm JST, and a molex 2-pin. In addition there's a primitive current test pin.
The sample image of the pendant shows it with three rotary encoders - which I think will be my first attempt. By default they'll do X,Y,Z positioning.
I build these at JLCPCB in China, where the cost per board is tiny (<$5) but the setup+mail costs are close to $40/order. The first run was 5 boards which may be the last run if they work.
For software I'm planning to use MicroPython and have it talk to the Duet boards via the REST api. If this fails (so far it looks good) I'll switch to C++.
Mark
-
RE: Custom CNC Pendant Applicationposted in General Discussion
@Nightowl It's just my personal opinion but I'm not a fan of Arduino software.
Arduino hardware is fine but it's very last generation and imho it's designed for hackers who want a quick sensor or monitor. The usual kit is an Atmega 328p - an 8 bit one-core processor with 1K ram and 32K flash at 20MHz.
The Pico W, by comparison, is - a 32 bit dual core (M0+) processor with 256K ram and 2MB of flash at 133MHz with WiFi.
-
RE: Custom CNC Pendant Applicationposted in General Discussion
@MadewithMayo I've got a pendant I've been working on; to contrast the design... the pendant uses a Raspberry Pi Pico W with WiFi, a 3.5" touchscreen LCD, and the RRF Rest interface to communicate. I've got a board being made (2 weeks) that adds Lipo battery support to the Pico so the pendant can be wireless handheld.
I'm planning to put two rotary switches (axis and speed) on the unit as well as one indicator dial for movement - much like a conventional pendant - see here -> https://www.amazon.com/RATTM-MOTOR-Handwheel-Emergency-MITSUBISHI/dp/B07CZ7F3Y3
I'm writing it in MicroPython - but their Pico W port is not quite stable yet.
I've written plenty in Arduino and in my personal opinion it's not a production OS.
Why do it this way?
a) I have three Duet3d systems that I'd like to control and having a wifi pendant lets me walk it around.
b) I hate cables. They get caught on things and have finite lengths and physical failures.
c) Writing a small amount of easily maintained Micropython seems easier than negotiating changes to a PanelDue set of code that's really not designed for my applications (such as a CNC router).
My 2c.
Mark