i am in the progress of setting up my printer to run with a Duet2 wifi +Duex5 in SBC mode, and i have got it connected and Working.
i do how ever have a problem with my z axis steppers not moving.
i have tried to send a "M564 S0 H0" and then move the axis, also did not work.
the 2 z axis stepper are connected to drive 2 and 4, and the jumpers are in place at drive 2
my config.g is just the same one i used before upgrading to SBC mode.
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v2 on Tue Mar 05 2019 15:58:37 GMT+0100 (Centraleuropæisk normaltid)
;3dprint counter
M950 S4 C"duex.pwm2" ;heater 7 as servo pin 4
M42 P4 S0 ; servo pin4 set to low
; General preferences
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves
; Network
M550 P"P3SBC" ; Set machine name
M551 P"iasdf" ; Set password
;M552 S1 ; Enable network
;M586 P0 S1 ; Enable HTTP
;586 P1 S0 ; Disable FTP
;586 P2 S0 ; Disable Telnet
; Drives
M584 X0 Y8 E1 Z2:4 V3 W7 U9 ; two Z motors connected to driver outputs Z and E1
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S0 ; Drive 1 goes forwards
M569 P2 S1 ; Drive 2 goes forwards
M569 P3 S1 ; Drive 3 goes forwards
M569 P4 S1 ; Drive 4 goes forwards
M569 P8 S0 ; Drive 8 goes backwards V
M569 P9 S0 ; Drive 9 goes forwards U
M569 P7 S1 ; Drive 7 goes forwards W
M350 X16 Y16 Z16:16 V16 U16 W16 I1 ; Configure microstepping without interpolation
M350 E16 I1 ; Configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00:400.00 E409.0 U400 V162 W26 ; Set steps per mm
M566 X300.00 Y300.00 Z36.00:36.00 E240.00 U200 V3600 W300 ; Set maximum instantaneous speed changes (mm/min)
M203 X12000.00 Y12000.00 Z1200.00:1200.00 E7200.00 U3000 V7000 W9000 ; Set maximum speeds (mm/min)
M201 X1300.00 Y1300.00 Z120.00:120.00 E3000.00 U500 V900 W900 ; Set accelerations (mm/s^2)
M906 X1500.00 Y1500.00 Z800.00:800.00 E1250.00 U750 V1000 W750 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
;Duel z compensation
M671 X-55:296 Y0:0 S5 ; leadscrews at left (connected to Z) and right
; Axis Limits
M208 X-8 Y-5 Z0 U0 V-1000 W0 S1 ; Set axis minima
M208 X237 Y215 Z200 U75 V1000 W78 S0 ; Set axis maxima
; Stall detection
M915 X Y U V W S20 R1 F1
; Endstops
M574 X1 Y1 S3 ; Set endstops controlled by motor load detection
M574 U2 W1 S3
M574 Z1 S2 ; Set endstops controlled by probe
M574 V1 P"e0stop" S1
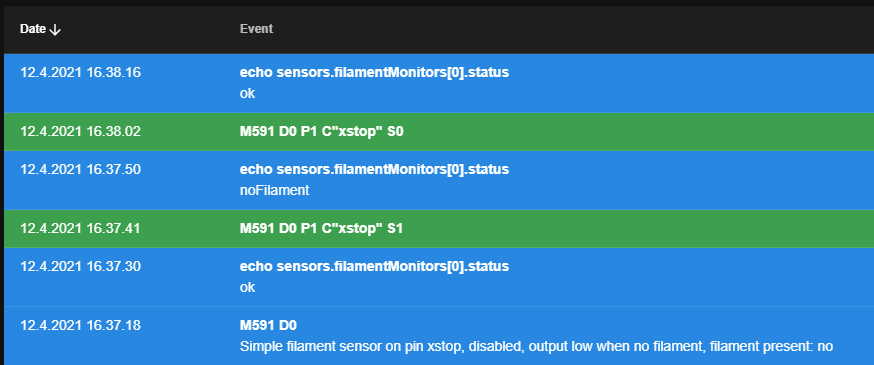
;Filament sensor
M591 D0 P1 C"xstop" S0
;led setup
M950 P2 C"e1heat" Q500
M42 P2 I1 S1 ; set lighting on full bright
; Z-Probe
M950 S0 C"duex.pwm1" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F240 T9000 ; Set Z probe type to bltouch and the dive height + speeds
G31 P500 X-14.65 Y19,29 Z3.24 ; Set Z probe trigger value, offset and trigger height
M557 X20:222 Y15:215 S30 ; Define mesh grid
; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 A"Bed" ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 A109.9 C411.9 D9.6 V11.7 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"spi.cs1" Y"rtd-max31865" A"Hotend" ; create sensor number 1 as a PT100 sensor in the first position on the Duet 2 daughter board connector
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 A354.8 C196.4 D4.3 V12 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S400
M308 S2 Y"drivers" A"Drivers" ; Set temperature limit for heater 1 to 400C
; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 C"Part Cooler" ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 C"Heatsink Cooler" ; set fan 1 value. Thermostatic control is turned on
;Tools
M563 P0 D0 H1 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C
M563 P1 D0 H1 ; Define tool 1
G10 P1 X0 Y0 Z0 ; Set tool 1 axis offsets
G10 P1 R0 S0 ; Set initial tool 1 active and standby temperatures to 0C
M563 P2 D0 H1 ; Define tool 2
G10 P2 X0 Y0 Z0 ; Set tool 2 axis offsets
G10 P2 R0 S0 ; Set initial tool 2 active and standby temperatures to 0C
M563 P3 D0 H1 ; Define tool 3
G10 P3 X0 Y0 Z0 ; Set tool 3 axis offsets
G10 P3 R0 S0 ; Set initial tool 3 active and standby temperatures to 0C
M563 P4 D0 H1 ; Define tool 4
G10 P4 X0 Y0 Z0 ; Set tool 4 axis offsets
G10 P4 R0 S0 ; Set initial tool 4 active and standby temperatures to 0C
;LCD screen setup
M575 P1 S1 B57600
;Global varibels
global purgeLoc = 0
;retraction setup
;M207 P0 S0.8 F3000 Z0.2 ;basic Retraction setup
; Automatic saving after power loss is not enabled
; M911 S10.7 R22 P"M913 X0 Y0 G91 M83 G1 Z3 E-1 F1000"
; Custom settings are not configured
T-1 P0
all the other axis homes and moves just fine.
when i try to home the z axis, the printer will do noting for some time, while i trys to move the z-axis up a bit, then it will move the X and Y to the center of the bed and deploy the Bltouch, and just stay there.
my homez.g
; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool v2 on Tue Mar 05 2019 15:58:37 GMT+0100 (Centraleuropæisk normaltid)
G91 ; relative positioning
G1 Z5 F6000 H2 ; lift Z relative to current position
G90 ; absolute positioning
G1 X120 Y110 F6000 ; go to first probe point
G30 ; home Z by probing the bed
; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 H2 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning
and finally a M122
7.5.2021 10.05.28: M122: === Diagnostics ===
RepRapFirmware for Duet 2 SBC version 3.3RC1 (2021-05-01 09:58:40) running on Duet 2 1.02 or later + SBC + DueX5 (SBC mode)
Board ID: 08DGM-9T6BU-FG3S8-6J1DJ-3SN6M-1SLBG
Used output buffers: 1 of 24 (14 max)
=== RTOS ===
Static ram: 17420
Dynamic ram: 62872 of which 0 recycled
Never used RAM 31268, free system stack 186 words
Tasks: SBC(ready,4.9%,268) HEAT(delaying,0.0%,331) Move(notifyWait,0.1%,364) DUEX(notifyWait,0.0%,24) MAIN(running,95.0%,361) IDLE(ready,0.0%,30), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:05:15 ago, cause: power up
Last software reset at 2021-05-07 08:39, reason: User, none spinning, available RAM 30996, slot 1
Software reset code 0x0012 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task SBC Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
Step timer max interval 0
MCU temperature: min 40.6, current 40.9, max 41.2
Supply voltage: min 12.1, current 12.1, max 12.1, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 99/1, heap memory allocated/used/recyclable 2048/12/0, gc cycles 0
Driver 0: position 0, standstill, SG min/max not available
Driver 1: position 0, standstill, SG min/max not available
Driver 2: position 0, standstill, SG min/max not available
Driver 3: position 0, standstill, SG min/max not available
Driver 4: position 0, standstill, SG min/max not available
Driver 5: position 0, standstill, SG min/max not available
Driver 6: position 0, standstill, SG min/max not available
Driver 7: position 0, standstill, SG min/max not available
Driver 8: position 0, standstill, SG min/max not available
Driver 9: position 0, standstill, SG min/max not available
Driver 10: position 0
Driver 11: position 0
Date/time: 2021-05-07 09:05:26
Cache data hit count 4294967295
Slowest loop: 1.27ms; fastest: 0.10ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Move ===
DMs created 83, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Filament sensors ===
Extruder 0 sensor: ok
=== DueX ===
Read count 0, 0.00 reads/min
=== SBC interface ===
State: 4, failed transfers: 0
Last transfer: 4ms ago
RX/TX seq numbers: 9884/9884
SPI underruns 0, overruns 0
Number of disconnects: 0, IAP RAM available 0x0d08c
Buffer RX/TX: 0/0-0
=== Duet Control Server ===
Duet Control Server v3.3-rc1
Code buffer space: 4096
Configured SPI speed: 8000000 Hz
Full transfers per second: 33.82
Codes per second: 0.07
Maximum length of RX/TX data transfers: 3565/784
")