@dc42 Thanks
Posts made by JKlaus
-
CAN ToolBoard wiring diagram double checkposted in Duet Hardware and wiring
I am finally wiring up my new IDEX printer.
And I wanted to be sure I am understanding the CAN wiring correctly.
There will be 2 ToolBoards connected to the Distribution board but I just drew one in the picture.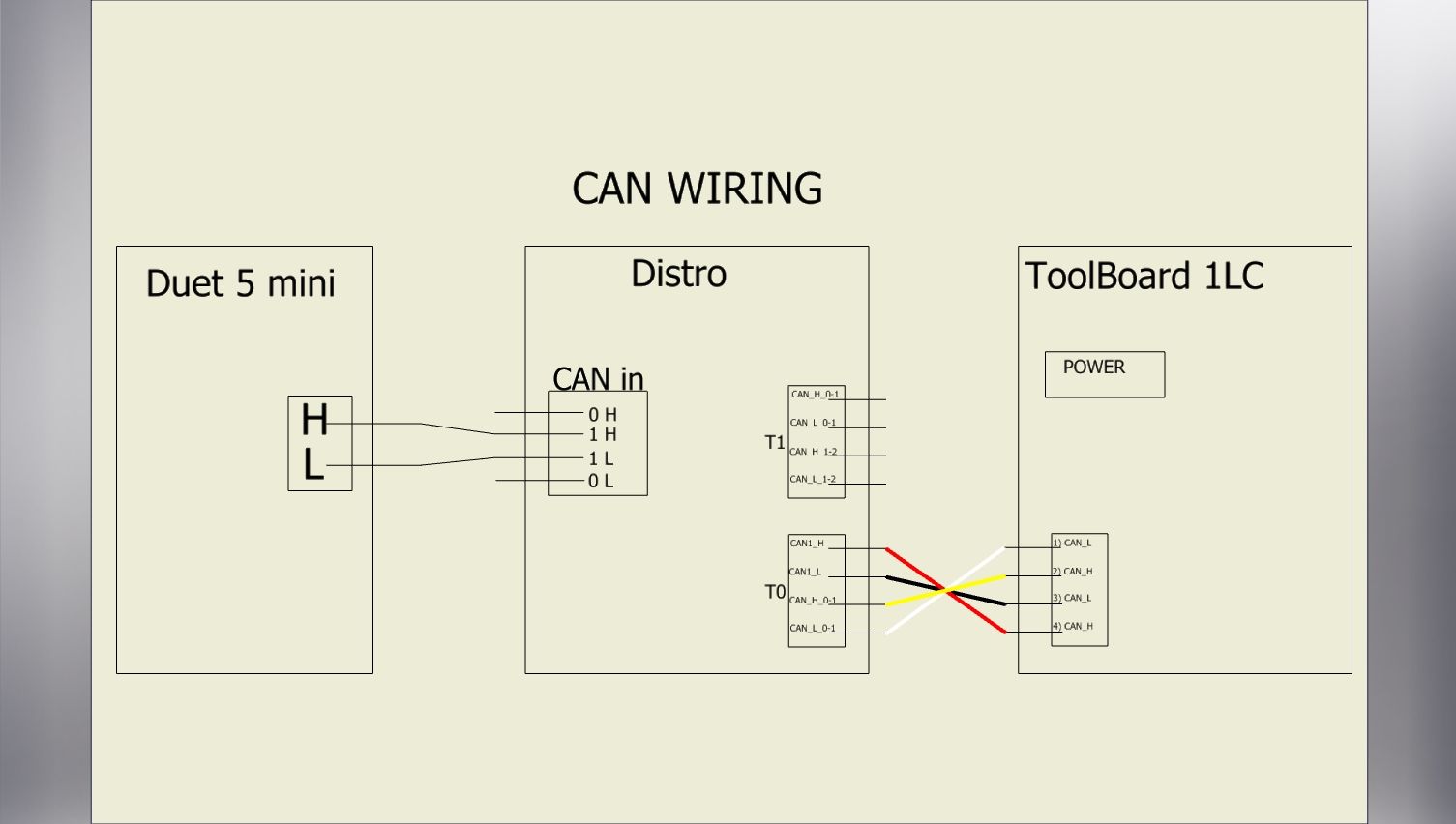
-
RE: IDEX printer axis motor sizing questionposted in General Discussion
@luke-slaboratory
True, running the numbers in Inventor my whole moving gantry assemble will run right at 11 pounds with everything but the X motors.
The small ones add on about another .6 pounds for both.
While a larger motor with double the torque would be about 1.3 pounds for both.
My Y is driven by 2 motors each with their own driver so throwing around that weight shouldn't be too hard.
And since they aren't moving I always have the option to go even larger on Y if necessary.
My only real concern with the weight is when the Z is getting high I am concerned about possible ringing.
The X axis looks to be 4.4 pounds without motors.
Growing to 5.0 or 5.7 pounds for small or large X motors.
Maybe I am just worrying too much about this and I should go for the large motors.
The connection between the gantry and Y bearing blocks is about as sturdy as I could make it without just being a chunk of aluminum.@o_lampe
That is a pretty interesting setup with a geared moving axis motor.
I haven't seen a setup using a bondtech gear setup to drive an axis before.
That plus something light like an orbiter on top would make a pretty sweet and light direct drive setup. -
RE: IDEX printer axis motor sizing questionposted in General Discussion
@luke-slaboratory
For moving the gantry itself I do actually have it being moved by 2 separate large steppers.
They are stationary so I don't care about their weight.
But the X axis motors that move the extruders are moving on the gantry so I want to keep their weight to a minimum. -
IDEX printer axis motor sizing questionposted in General Discussion
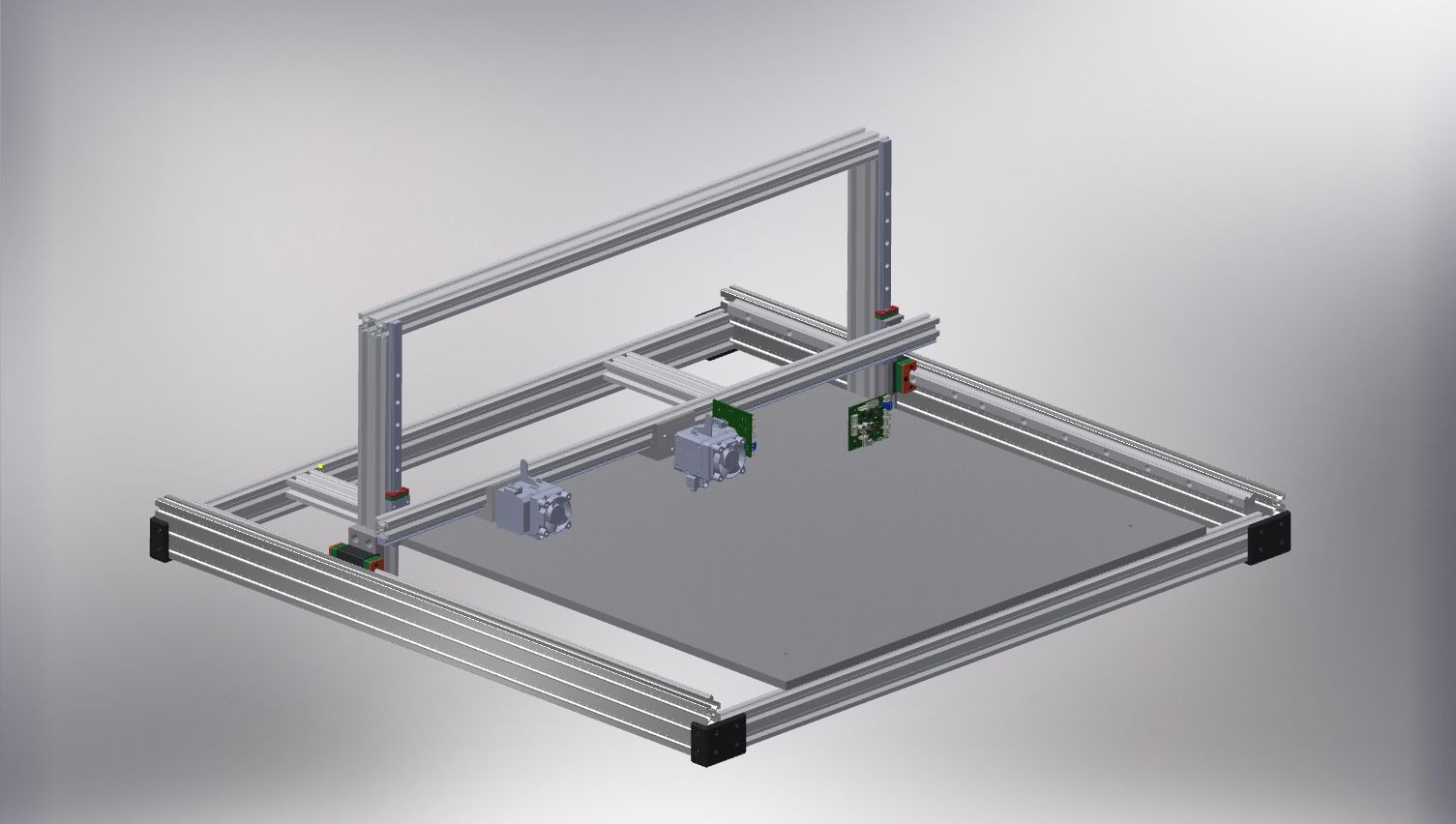
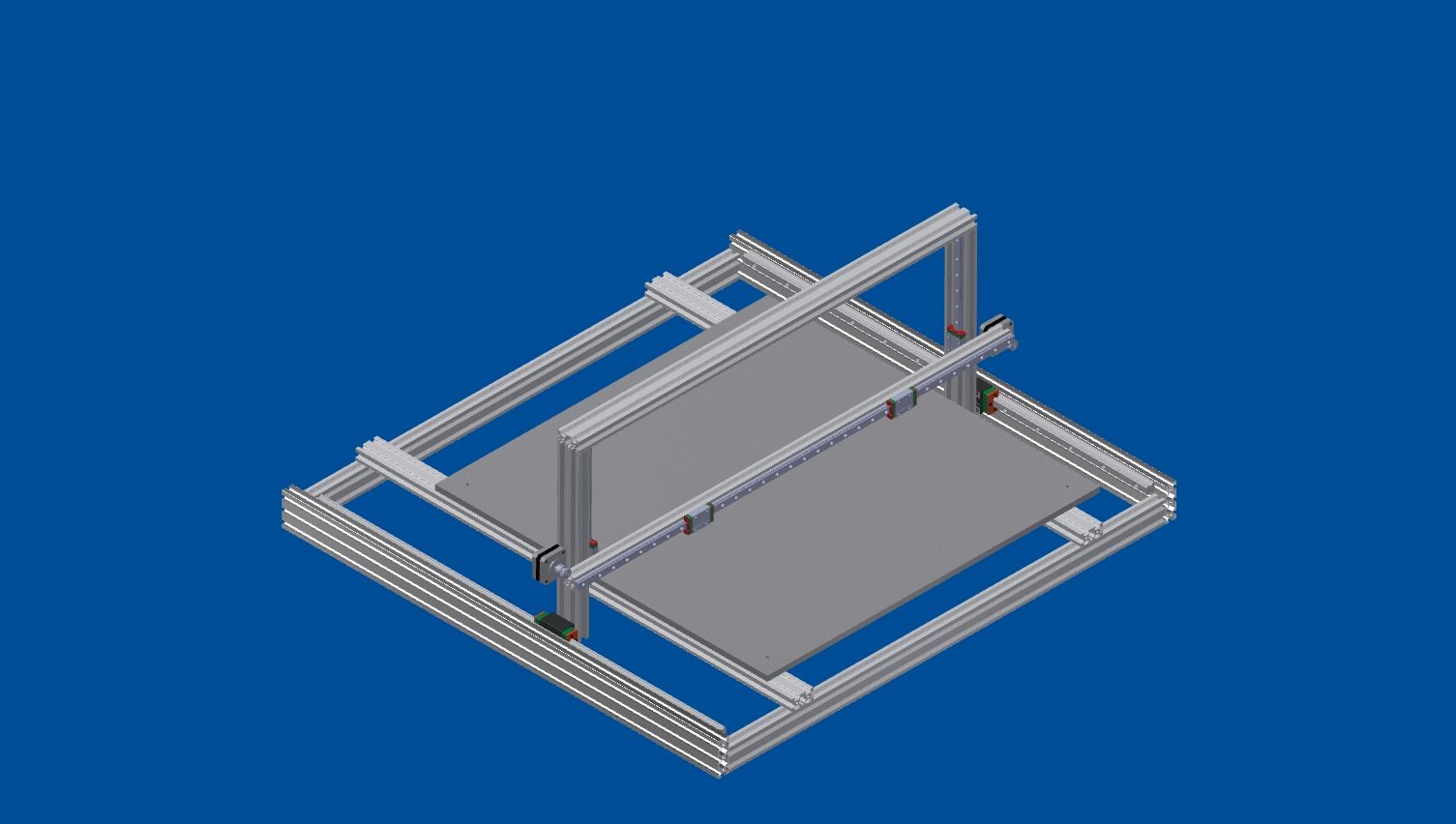
I am building a 600x600x200 idex printer with a moving gantry.
Because the gantry is going to be moving on the Y I am trying to keep the weight down.
I am wondering it a pancake stepper would be able to get the job done.
The moving mass of each extruder if going to be close to 500g all inclusive.
That is a 270g Bondtech LGX FF and a 100g mgn12h carriage and a bit extra for brackets.Specifically I am looking at the LDO 42STH20-1004AS "Super Slim" motor.
I will be running a 16T motor pulley to help the give the motor a little more help.
With all the other mass that I am trying to throw around I would love to use a pair of these small motors to minimize the moving mass.Thanks.

-
RE: Duet 3 mini 5+ with 8 stepper drivers?posted in General Discussion
@dc42 I am going to have dual steppers on Y and Z.
With the moving gantry it will be a little heavy so I want to be sure I have enough to power to move it all relatively quickly.
With the 2209's I am not sure if they have the power available to run a pair of motors and get the job done.
I may be wrong on that but I would rather have more overhead instead of being worried I was underpowered.
-
RE: Duet 3 mini 5+ with 8 stepper drivers?posted in General Discussion
@dc42 I am planning on going direct with probably an orbiter/volcano setup. The toolboard is definitely interesting.
A pair of those along with the 2 channel 2209 add on board would get the job done.
And simplifying the wiring to the heads would definitely be welcome.
I need to see if I can work in that board into the heads.
Is there a 3d model of the board somewhere so I can throw it into Inventor to play with?Edit: Nevermind, I just found the step file on the wiki.
-
RE: Duet 3 mini 5+ with 8 stepper drivers?posted in General Discussion
That is perfect, I wasn't sure if those other CAN accessories were compatible.
I had seen that it could control up to 7x 2209 so I didn't know if those other boards would work with the 5+Thanks for all the responses.
I am trying to put together a pair of 600x600x200 IDEX printers to take care a bunch of large flat parts I will need to print.
They are going to be a stationary bed with a moving gantry all on linear rails.
Getting all the settings sorted out to get the IDEX up and working should be interesting.
But they will probably start with a single tool head to get that squared away before adding complexity.
Currently I have 2x printers with Duet 2's in them (1 ender 3 pro, 1 custom 400mm cube)


-
Duet 3 mini 5+ with 8 stepper drivers?posted in General Discussion
Is there any way to get 8 stepper drivers with a 5+?
I have see the add on board that bumps it up to 7.
But is there a way to get 1 more without stepping up to the 6HC or back to a duet 2? -
RE: Can't move after 1.21>2.02 updateposted in Firmware installation
That works, Thanks.
It is all working just fine again. -
Can't move after 1.21>2.02 updateposted in Firmware installation
i just updated my CoreXY machine from 1.21 to to 2.02 and then the 2.03 beta release.
But unfortunately I must have missed something because now it is refusing to let me move the machine.
I am getting an "Error: G0/G1: insufficient axes homed" when I try to move it from the web control panel.
Trying to run my X or Y homing throws the same error.
I have already switched the S1 commands to H1 on the G1 lines of my homing files but I must be missing something else.
Here are my homex.g and config.g
Any help would be greatly appreciated.; homex.g
; called to home the X axis; Lift Z relative to current position
G91
G1 Z5 F6000
G90; Move quickly to X axis endstop and stop there (first pass)
G1 X415 F5000 H1; Go back a few mm
G91
G1 X-3 F6000
G90; Move slowly to X axis endstop once more (second pass)
G1 X415 F200 H1; Lower Z again
G91
G1 Z-5 F6000
G90; config.g
; Configuration file for Duet WiFi (firmware version 1.20 or newer)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool on Fri Jan 05 2018 16:34:34 GMT-0600 (Central Standard Time); General preferences
M111 S0 ; Debugging off
G21 ; Work in millimetres
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves
M555 P2
M307 H3 A-1 C-1 D-1 ; Set firmware compatibility to look like Marlin
M572 D0 S0.08 ; Pressure advance on
; Automatic saving after power loss is not enabledM667 S1 ; Select CoreXY mode
M208 X0 Y0 Z0 S1 ; Set axis minima
M208 X400 Y408 Z390 S0 ; Set axis maxima; Endstops
M574 X2 Y2 S3 ; Set active high endstops
M574 Z1 S2 ; Set endstops controlled by probe
M558 P5 X0 Y0 Z1 H4 F250 T5000 R.5 A3 S.02 ; Set Z probe type to unmodulated and the dive height + speeds
G31 P25 X0 Y21.5 Z0.4 ; Set Z probe trigger value, offset and trigger height
M556 S150 X.08 Y0 Z0 ; Set orthogonal axis compensation parameters
M557 X25:375 Y25:375 S20 ; Define mesh grid; Drives
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S0 ; Drive 1 goes forwards
M569 P2 S1 ; Drive 2 goes forwards
M569 P3 S1 ; Drive 3 goes forwards
M350 X16 Y16 Z16 E16 I1 ; Configure microstepping with interpolation
M350 E16 I0 ; Configure microstepping without interpolation
M92 X100 Y100 Z400 E439.5 ; Set steps per mm
M566 X1000 Y1000 Z600 E1500 ; Set maximum instantaneous speed changes (mm/min)
M203 X12000 Y12000 Z600 E6000 ; Set maximum speeds (mm/min)
M201 X1000 Y1000 Z250 E1000 ; Set accelerations (mm/s^2)
M906 X2000 Y2000 Z2000 E1000 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Heaters
M305 P0 T100000 B4725 C7.060000e-8 R4700 ; Set thermistor + ADC parameters for heater 0
M143 H0 S120 ; Set temperature limit for heater 0 to 120C
M305 P1 T100000 B4725 C7.060000e-8 R4700 ; Set thermistor + ADC parameters for heater 1
M143 H1 S330 ; Set temperature limit for heater 1 to 330C; Tools
M563 P0 D0 H1 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C; Network
M550 PCoreXY ; Set machine name
M552 S1 ; Enable network
M586 P0 S1 ; Enable HTTP
M586 P1 S0 ; Disable FTP
M586 P2 S0 ; Disable Telnet; Fans
M106 P0 S0 I0 F500 H-1 ; Set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off
M106 P1 S1 I0 F500 H1 T45 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P2 S1 I0 F500 H1 T45 ; Set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned on; Custom settings
G29 S1 ;load grid levelling mesh
M376 H10 ;taper off compensation after 10mm