@dc42 I think I understand the problem...
If I make a movement of 0.5mm from the dashboard the M425 code does its job very well, if I make movements of 0.05mm the machine does not make any corrections.
@dc42 I think I understand the problem...
If I make a movement of 0.5mm from the dashboard the M425 code does its job very well, if I make movements of 0.05mm the machine does not make any corrections.
@gloomyandy I measured the distance with 0.45 using the movement buttons on the dashboard page +0.05 -0.05, when I reverse the direction of rotation I measure about 0.45mm before the dial indicator moves...
Thanks so much for the support.
I tried with M425 Z2 S10 and M425 Z5 S10 but it doesn't work.
I detected an error of approximately 0.45mm on the z axis with the comparator.
Honestly, I read it wrong, and I thought it was microstep.
Now I try to put like 2mm as a value.
I have a centesimal comparator placed on the Z axis
M584 X0.0 Y0.1 Z0.2 ; set drive mapping
M350 X16 Y16 Z16 I0 ; configure microstepping without interpolation
M92 X8533.33 Y8533.33 Z3675 ; set steps per mm
M425 Z2500 S5
(
Good evening everyone, I kindly ask for clarification on the use of the M425 Code to use it on a small milling machine equipped with a Duet 3d 6HC v1.02 (Firmware version 3.5.0-rc.1)
I'm modifying the milling machine to be able to use it with CAM software.
The X and Y axes do not need a recovery with M425, while the Z axis does.
I tried to put a line with M425 Zxx Sxx in the config.g file but it doesn't change anything?
Can anyone tell me where I'm wrong?
@dc42 The result of the M122 that I posted above was the tenth of the session since it was on.
Today I tried unplugging everything and keeping the card on for hours.
This is the result.
25/7/2023, 21:22:03 m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.5.0-beta.4 (2023-06-08 23:41:30) running on Duet 3 MB6HC v1.02 or later (standalone mode)
Board ID: 08DJM-9P63L-DJ3T0-6J1F8-3SN6S-TV3BB
Used output buffers: 3 of 40 (31 max)
Error in macro line 33 while starting up: Response timeout: CAN addr 40, req type 6018, RID=0
=== RTOS ===
Static ram: 155012
Dynamic ram: 121896 of which 0 recycled
Never used RAM 66228, free system stack 208 words
Tasks: NETWORK(1,ready,41.5%,153) ETHERNET(5,nWait,0.0%,321) HEAT(3,nWait,0.0%,329) Move(4,nWait,0.0%,332) CanReceiv(6,nWait,0.0%,941) CanSender(5,nWait,0.0%,335) CanClock(7,delaying,0.0%,343) TMC(4,nWait,8.1%,59) MAIN(1,running,50.4%,444) IDLE(0,ready,0.0%,30), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 06:56:47 ago, cause: power up
Last software reset at 2023-07-24 16:54, reason: User, Gcodes spinning, available RAM 65140, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
MCU temperature: min 38.6, current 38.9, max 39.6
Supply voltage: min 23.8, current 23.9, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 0.6, current 12.1, max 12.3, under voltage events: 2
Heap OK, handles allocated/used 99/2, heap memory allocated/used/recyclable 2048/64/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min n/a, mspos 8, reads 7823, writes 11 timeouts 0
Driver 1: standstill, SG min n/a, mspos 0, reads 7824, writes 11 timeouts 0
Driver 2: standstill, SG min n/a, mspos 8, reads 7824, writes 11 timeouts 0
Driver 3: standstill, SG min n/a, mspos 8, reads 7824, writes 11 timeouts 0
Driver 4: standstill, SG min n/a, mspos 8, reads 7824, writes 11 timeouts 0
Driver 5: standstill, SG min n/a, mspos 8, reads 7823, writes 11 timeouts 0
Date/time: 2023-07-25 21:22:03
Slowest loop: 5.19ms; fastest: 0.07ms
=== Storage ===
Free file entries: 20
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 2.3ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, ebfmin 0.00, ebfmax 0.00
no step interrupt scheduled
=== DDARing 0 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters 3 -1 -1 -1, ordering errs 0
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 0, axes/extruders owned 0x0000000
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 41222, received 0, lost 0, boc 0
Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 50 (min 50), ts 22901/0/0
Tx timeouts 0,0,22901,0,0,18321 last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 4.03ms; fastest: 0.03ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 1 of 8
= Ethernet =
Interface state: active
Error counts: 0 0 0 0 0 0
Socket states: 5 2 2 2 2 0 0 2
= WiFi =
Interface state: disabled
Module is disabled
Failed messages: pending 0, notready 0, noresp 0
Socket states: 0 0 0 0 0 0 0 0
=== Multicast handler ===
Responder is inactive, messages received 0, responses 0
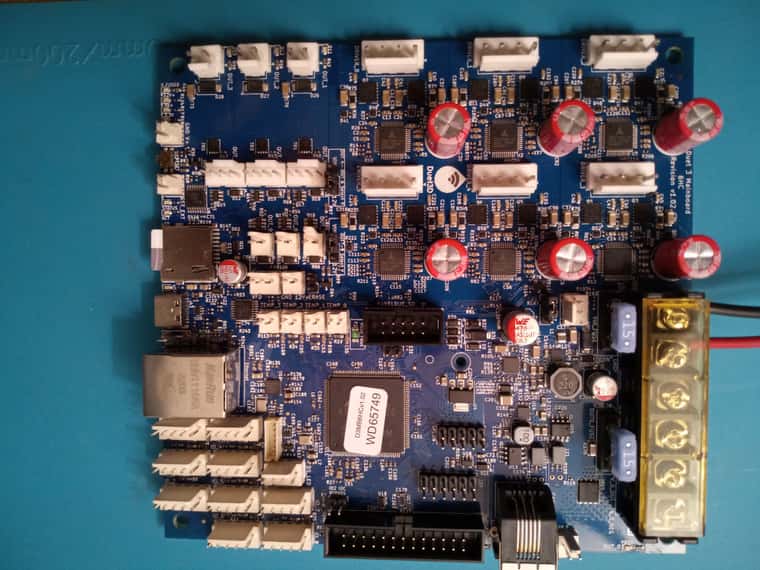
I bought the board in Italy from COMPASS DHM PROJECT on 03/23/2023, this is the replacement for the first defective one that was delivered to me in May 2023 after a warranty replacement procedure.
![IMG_20230725_093642[1].jpg](/assets/uploads/files/1690270718512-img_20230725_093642-1-resized.jpg)
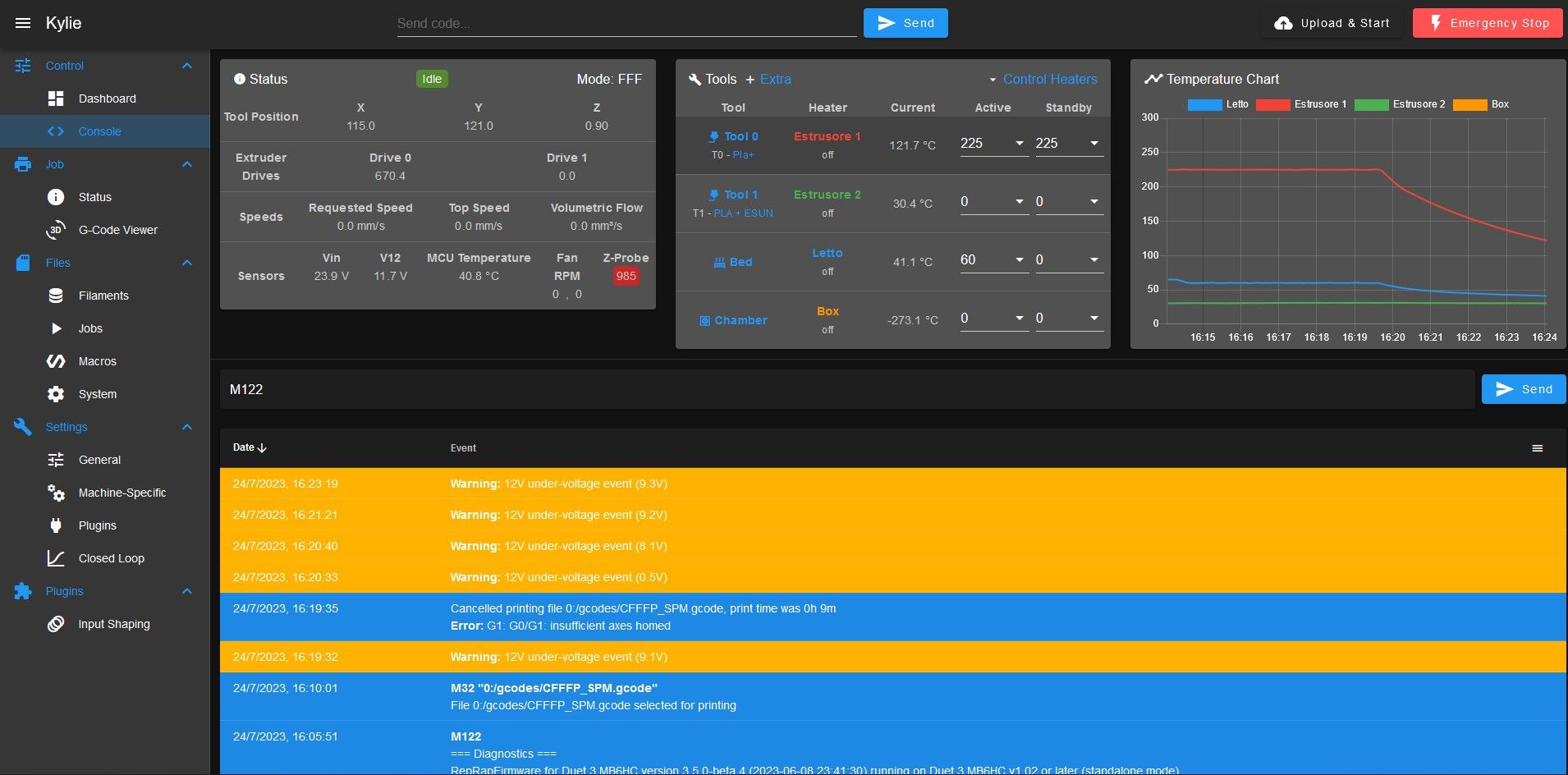
After a month of inactivity, today I try to turn the printer back on but after about 5 minutes of printing the machine stops and a series of "Warning: 12V under-voltage event (x.x V)" errors appear.
I have tried unplugging all motors, all sensors and all fans and the voltage remains at 11.8V.
I have already mounted a new power supply that I had from 24V but the problem has not been solved
I tried with the M122 command to receive diagnostic information.
Warning: 12V under-voltage event (9.4V)
24/7/2023, 17:21:45 m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.5.0-beta.4 (2023-06-08 23:41:30) running on Duet 3 MB6HC v1.02 or later (standalone mode)
Board ID: 08DJM-9P63L-DJ3T0-6J1F8-3SN6S-TV3BB
Used output buffers: 3 of 40 (18 max)
=== RTOS ===
Static ram: 155012
Dynamic ram: 122036 of which 0 recycled
Never used RAM 68944, free system stack 204 words
Tasks: NETWORK(1,ready,34.6%,182) ETHERNET(5,nWait,0.1%,568) HEAT(3,nWait,0.0%,335) Move(4,nWait,0.0%,340) CanReceiv(6,nWait,0.0%,820) CanSender(5,nWait,0.0%,335) CanClock(7,delaying,0.0%,344) TMC(4,nWait,1.0%,61) MAIN(1,running,64.1%,444) IDLE(0,ready,0.2%,30), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:00:48 ago, cause: power up
Last software reset at 2023-07-24 16:54, reason: User, Gcodes spinning, available RAM 65140, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
MCU temperature: min 28.0, current 37.2, max 37.3
Supply voltage: min 23.9, current 23.9, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 4.0, current 10.2, max 10.3, under voltage events: 4
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min 19, mspos 8, reads 32059, writes 55 timeouts 0
Driver 1: standstill, SG min 19, mspos 0, reads 32059, writes 55 timeouts 0
Driver 2: standstill, SG min 0, mspos 8, reads 32060, writes 55 timeouts 0
Driver 3: standstill, SG min 19, mspos 8, reads 32060, writes 55 timeouts 0
Driver 4: standstill, SG min 19, mspos 8, reads 32060, writes 55 timeouts 0
Driver 5: standstill, SG min 19, mspos 8, reads 32060, writes 55 timeouts 0
Date/time: 2023-07-24 17:21:42
Slowest loop: 4.65ms; fastest: 0.07ms
=== Storage ===
Free file entries: 20
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 2.4ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, ebfmin 0.00, ebfmax 0.00
no step interrupt scheduled
=== DDARing 0 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== DDARing 1 ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters 3 -1 -1 -1, ordering errs 0
=== GCodes ===
Movement locks held by null, null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
File2 is idle in state(s) 0
Queue2 is idle in state(s) 0
Q0 segments left 0, axes/extruders owned 0x0000000
Code queue 0 is empty
Q1 segments left 0, axes/extruders owned 0x0000000
Code queue 1 is empty
=== CAN ===
Messages queued 429, received 569, lost 0, boc 0
Longest wait 1ms for reply type 6031, peak Tx sync delay 58278, free buffers 50 (min 49), ts 242/239/0
Tx timeouts 0,0,2,0,0,0 last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 8.13ms; fastest: 0.03ms
Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 1 of 8
= Ethernet =
Interface state: active
Error counts: 0 0 0 1 0 0
Socket states: 5 2 2 2 2 0 0 2
= WiFi =
Interface state: disabled
Module is disabled
Failed messages: pending 0, notready 0, noresp 0
Socket states: 0 0 0 0 0 0 0 0
=== Multicast handler ===
Responder is inactive, messages received 0, responses 0
Warning: 12V under-voltage event (9.2V)
How can I do it, is it a firmware problem (3.5.0 BETA.4) or is it a card problem?
Thanks in advance.
Good evening everyone,
especially at @DC42
I would like to ask if anyone knows if I can sum two input shaping algorithms
I have a problem with frequencies around 65 hz and i can fix them very well with ei3 but from 25 hz up... below 12 hz i have to decrease the acceleration a lot to get the best results.
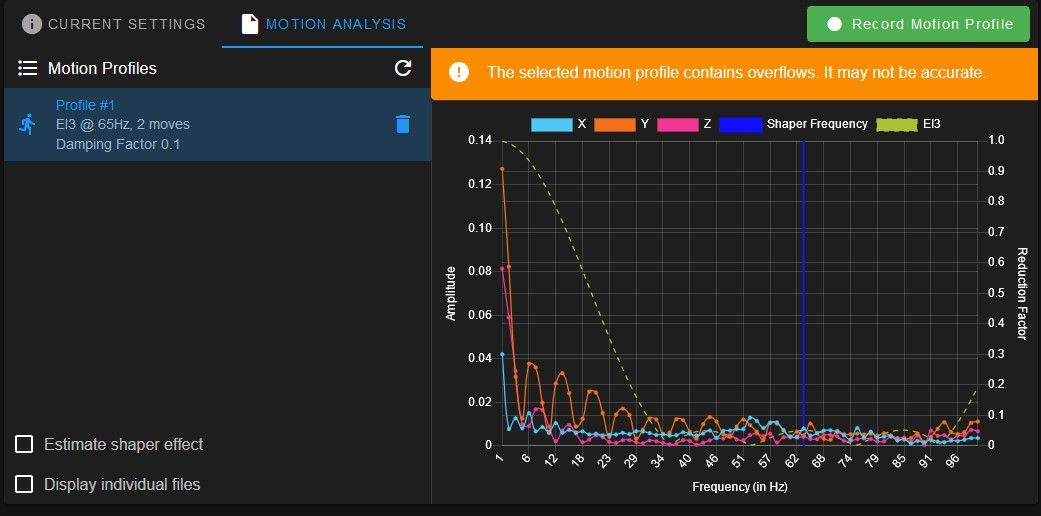

The strange thing is that the faster the printer goes, the better it prints... at an average of 250 mm/s the printer shows much fewer defects than at 80 mm/s
@dc42 ;
I have another question to ask, if I wanted to activate the brake of the 1HCL board so that when the motor moves it is deactivated and when the motor stops in a position of the Z axis an electromagnet along the carriage is activated, it is possible to do it using the config file?
The way the 1HCL is currently configured the 24V always goes out even when the engine is running, so I can't use it.
; Drives
M569.1 P40.0 T1 R30 I50 D0 E2:4 C1985
M569.7 P40.0 C"out0" S500
M569 P40.0 S1 D4 ; physical drive 40.0 goes forwards
Error: Driver 40.0 basic tuning failed, the measured motion was more than expected, measured counts/rev is about 1963.4
Warning: Driver 40.0 warning: tuning/calibration failed
With the value I=500 now it seems that it works, in these days I will try to find the best calibration.
I'll keep it updated.
Thanks a lot for your support.
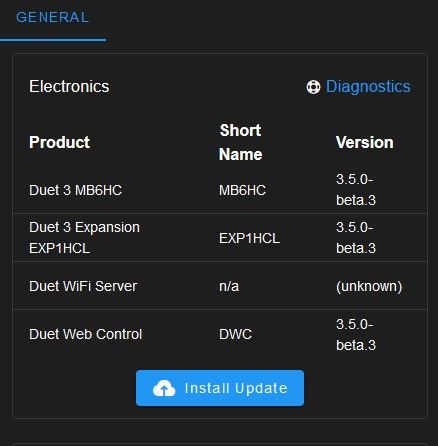
Used Firmware
Calibration result T3 only
M98 P"0:/macros/T3_REnc"
Driver 40.0 calibration succeeded, measured backlash is 0.138 step
Original encoder reading errors: min -14.4, max 14.5, rms 6.0
Corrections made: min -8.4, max 9.3, rms 5.7
1HCL board diagnostics
m122 b40
Diagnostics for board 40:
Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 23392, free system stack 178 words
Tasks: EncCal(nWait,0.7%,184) Move(nWait,0.0%,115) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,43) CanClock(nWait,0.0%,70) TMC(nWait,57.0%,318) CLSend(nWait,0.0%,152) MAIN(running,40.3%,289) IDLE(ready,0.3%,29) AIN(nWait,1.8%,267), total 100.0%
Last reset 00:01:31 ago, cause: power up
Last software reset data not available
Closed loop enabled: yes, pre-error threshold: 2.00, error threshold: 4.00, encoder type rotaryAS5047, position 11552
Encoder reverse polarity: yes, full rotations 0, last angle 11552, minCorrection=-8.4, maxCorrection=9.3, agc 0, mag 4757, no error
Tuning mode: 0, tuning error: 0, collecting data: no
Control loop runtime (us): min=4, max=40, frequency (Hz): min=5137, max=17442
Driver 0: pos -21438, 80.3 steps/mm,ok, SG min 0, mspos 520, reads 36075, writes 13503 timeouts 0, steps req 3 done 161Moves scheduled 7, completed 7, in progress 0, hiccups 0, step errors 0, maxPrep 17, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -4/6, peak Rx sync delay 219, resyncs 0/0, next timer interrupt due in 11 ticks, enabled, next step interrupt due in 4269949897 ticks, disabled
VIN voltage: min 24.1, current 24.2, max 24.2
V12 voltage: min 12.1, current 12.2, max 12.2
MCU temperature: min 20.2C, current 24.0C, max 24.2C
Last sensors broadcast 0x00000030 found 2 38 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 1292, send timeouts 0, received 1008, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 285, adv 37081/37199
Accelerometer: none
I2C bus errors 12, naks 0, other errors 0
In T3 mode with only one encoder it works, where could be the problem?
@Italiano85 @dc42
After many tests, and having found a calibration for the nema 23 motor, I managed to make the calibrations with two separate macro files.
Macro 1
M569 P40.0 D0
M98 P"homez.g"
G4 S2
G1 Z100 F2000
M569.1 P40.0 T3 R30 I2000 D0 E2:4
M569 P40.0 D4
G4 S2
M569.6 P40.0 V2
Macro 1 does the calibration only with the magnetic encoder on the shaft, and is successful with this result:
Driver 40.0 calibration succeeded, measured backlash is 0.135 step
Original encoder reading errors: min -13.1, max 15.2, rms 6.4
Corrections made: min -8.9, max 10.9, rms 6.2
Macro 2 which calibrates the direction of the linear encoder is successful with the result attached below, but as soon as I have finished the calibrations and I try to move the Z axis the machine goes out of control, making jerky movements.
Macro 2
M569 P40.0 D0
M98 P"homez.g"
G4 S2
G90
G1 Z100 F500
M569.1 P40.0 T1 C2000 R30 I2000 D0 E2:4
M569 P40.0 D4
G4 S2
M569.6 P40.0 V1
G1 Z0
Result
M98 P"0:/macros/T1_LREnc"
Driver 40.0 basic tuning succeeded, measured backlash 0.509 step
Test Result
Diagnostics for board 40:
Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 23536, free system stack 184 words
Tasks: EncCal(nWait,0.0%,474) Move(nWait,0.0%,156) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,77) CanClock(nWait,0.0%,70) TMC(nWait,58.9%,336) CLSend(nWait,0.0%,152) MAIN(running,39.3%,271) IDLE(ready,0.1%,29) AIN(nWait,1.7%,267), total 100.0%
Last reset 00:20:53 ago, cause: power up
Last software reset data not available
Closed loop enabled: yes, pre-error threshold: 2.00, error threshold: 4.00, encoder type linearComposite, position -155
Shaft: Encoder reverse polarity: yes, full rotations -1, last angle 12012, minCorrection=-8.9, maxCorrection=10.9, agc 0, mag 4757, no error
Lin: Encoder reverse polarity: yes, raw count 155
Tuning mode: 0, tuning error: 0, collecting data: no
Control loop runtime (us): min=6, max=44, frequency (Hz): min=8523, max=16304
Driver 0: pos 0, 80.3 steps/mm,position tolerance exceededMoves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -6/5, peak Rx sync delay 223, resyncs 0/0, next timer interrupt due in 7 ticks, enabled, next step interrupt due in 3354668361 ticks, disabled
VIN voltage: min 24.2, current 24.2, max 24.2
V12 voltage: min 12.1, current 12.2, max 12.2
MCU temperature: min 28.4C, current 29.0C, max 29.2C
Last sensors broadcast 0x00000030 found 2 18 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 15066, send timeouts 0, received 11287, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0
Accelerometer: none
I2C bus errors 12, naks 0, other errors 0
Anyone have any suggestions?
@Italiano85 I tried restarting the printer and entering the code M569.6 P40.0 V2 I got this response.
21/5/2023, 16:51:33 M569.6 P40.0 V2
Error: M569.6: Drive is not enabled
21/5/2023, 16:51:29 M569.6 P40.0 V1
Error: M569.6: Drive is not enabled
Then I tried to press the Home button which just blocked the engine, then I tried to send the command M569.6 P40.0 V2
within a few seconds the printer started to calibrate the axis and once finished it sent the Z axis carriage at full speed in the opposite homing direction.
I had to press the emergency button.
If I try now this is the result.
21/5/2023, 16:47:02: M596.6 P40.0 V1: Warning: M596.6: Command is not supported
21/5/2023, 16:47:05: M596.6 P40.0 V2: Warning: M596.6: Command is not supported
Good morning everyone,
I bought a Duet3D 1HCL card and a Duet3D Magnetic Encoder v0.3 that I'm trying to configure with an MSR5000 linear magnetic encoder applied on the axis of a Cartesian printer to have a very high precision reference in the Z axis.
I had a little difficulty configuring the Duet 3D encoder applied to the Nema 23 motor shaft but I managed it with the following codes in the config.g file.
; Drives
M569.1 P40.0 T1 C5 R25 I0 D0 E2:4
M569 P40.0 S1 D4 ; physical drive 40.0 goes forwards**
M569 P0.0 S0 ; physical drive 0.0 goes forwards
M569 P0.1 S0 ; physical drive 0.1 goes forwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M569 P0.4 S0 ; physical drive 0.4 goes forwards
M584 X0.0 Y0.1 Z40.0 E0.3:0.4 ; set drive mapping
M350 Z256 I0 ; configure microstepping without interpolation
M350 X16 Y16 E16:16 I1 ; configure microstepping with interpolation
M92 X80.35 Y80.75 Z1287.00 E140:440 ; set steps per mm
M566 X900.00 Y900.00 Z600.00 E120.00:120 ; set maximum instantaneous speed changes (mm/min)
M203 X10000.00 Y10000.00 Z10000.00 E1200.00:1200.00 ; set maximum speeds (mm/min)
M906 X1000 Y1000 Z3500 E800:800 I40 ; set motor currents (mA) and motor idle factor in per cent
M201 X3000.00 Y3000.00 Z3100.00 E2500.00:2500.00 ; set accelerations (mm/s^2)
M84 S10 ; Set idle timeout
Now I've reached the point that the 1HCL card is able to communicate with both encoders and by executing the M122 B40 command I can get this information.
M122 B40
Diagnostics for board 40:
Duet EXP1HCL firmware version 3.5.0-beta.3 (2023-04-14 13:08:48)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 23536, free system stack 184 words
Tasks: EncCal(nWait,0.0%,474) Move(nWait,0.0%,156) HEAT(nWait,0.0%,82) CanAsync(nWait,0.0%,63) CanRecv(nWait,0.0%,77) CanClock(nWait,0.0%,70) TMC(nWait,55.4%,334) CLSend(nWait,0.0%,152) MAIN(running,42.6%,271) IDLE(ready,0.0%,29) AIN(nWait,2.0%,267), total 100.0%
Last reset 00:32:15 ago, cause: power up
Last software reset data not available
Closed loop enabled: yes, pre-error threshold: 2.00, error threshold: 4.00, encoder type linearComposite, position 0
Shaft: Encoder reverse polarity: yes, full rotations 0, last angle 1187, minCorrection=-8.4, maxCorrection=10.9, agc 0, mag 4750, no error
Lin: Encoder reverse polarity: no, raw count 0
Tuning mode: 0, tuning error: 0x1, collecting data: no
Control loop runtime (us): min=5, max=36, frequency (Hz): min=8721, max=16667
Driver 0: pos 0, 1287.0 steps/mm,not tuned/calibrated, SG min n/Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -6/7, peak Rx sync delay 203, resyncs 0/0, next timer interrupt due in 20 ticks, enabled, next step interrupt due in 2843319205 ticks, disabled
VIN voltage: min 24.2, current 24.2, max 24.2
V12 voltage: min 12.1, current 12.2, max 12.2
MCU temperature: min 18.9C, current 26.9C, max 26.9C
Last sensors broadcast 0x00000030 found 2 75 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 23249, send timeouts 0, received 17425, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0
Accelerometer: none
I2C bus errors 12, naks 0, other errors 0
The only problem is that now the Z axis motor stops once the machine zero key has been pressed, it does not move and it does not perform the Homing procedure.
Can anyone help me?
P.S.
Version of firmware