@JoergS5
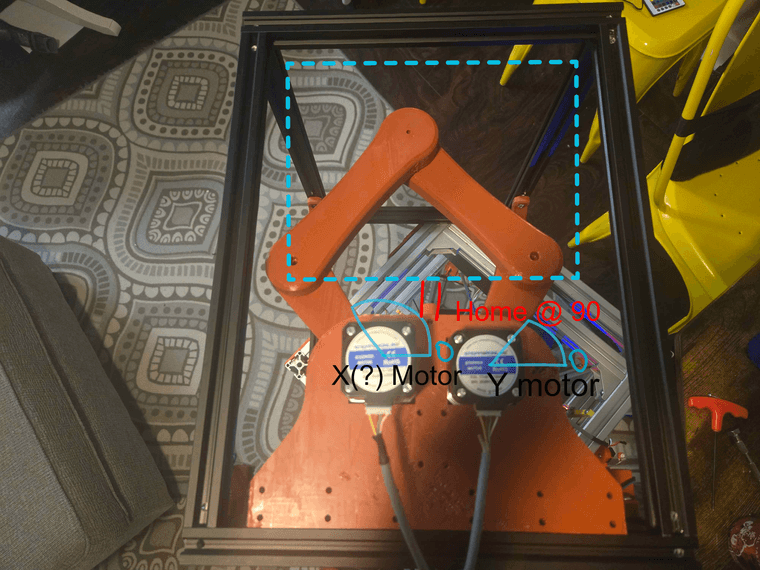
Good to see you! Yes that is the page I started from. Playing around with the config yesterday I was able to get it to home by updating the homing values. I will post an updated version of my config that sorta works to show what I have now. I can move the arm in the workspace, But after homing and jogging the arm back to center, It reads -44 on X and 99.6 on Y, when both arms should read around 45 and 135.
Also, currently moving in positive Y pulls the arm closer to the motors, and Y travel is in a skew to the left.
I did see that in the motor testing section the X motor which for me is the right motor, should turn counterclockwise when given a relative X+ movement but that seems to invert once absolute position is called.
Parts of my config are below, Please let me know what im missing.
Thanks!
M92 X355.55 Y355.55 Z400 ; configure steps per mm
M208 X-60:360 Y-60:360 Z0:250 ; set minimum and maximum axis limits
M669 K9 X-32.5:32.5 Y0:0 L2 P110:110 D140:140:0:0 B200:90 C80:200:0:150 Z-180:-180:180:180 ; configure 5 Bar Parallel
M574 X1 P"xstop" S1 ; configure X axis endstop
M574 Y1 P"ystop" S1 ; configure Y axis endstop
M574 Z1 P"zstop" S1 ; configure Z axis endstop
SCARA kinematics