I'm measuring 3.3 V at P3. How do I change it to 5V.
Posts made by dmc456
-
RE: How to setup and configure a servoposted in General Discussion
-
RE: How to setup and configure a servoposted in General Discussion
Please confirm
The M307 and M42 go in the config.g file to assign the pin?
The M42 is the gcode command used to move the servo which I can use in my slicer software.
-
RE: How to setup and configure a servoposted in General Discussion
I am running RR2.....does the following make sense?
Add to the config.g file to configure the port for PWM1 running RR2.
M42 P3 S1500;
P3 is the pin for RR3, but I couldn't find any RR2 pin numbers, S1500 move the servo to the center.For my gcode commands:
M280 P3 S1000 to move to one extreme
M280 P3 S1500 to move the middle
M280 P3 S2000 to move to the other extremeLooking for someone who understands this before I try it.
I have also seen where the pin # might be 8
Scroll down to PWM1 pins for heaters
https://docs.duet3d.com/Duet3D_hardware/Duet_2_family/Duet_2_WiFi_Ethernet_Hardware_Overview -
RE: How to setup and configure a servoposted in General Discussion
Looks like I use the 42 command in my config.g to assign. Im using RR2.x firmware
And then M280 in my gcode to position the servo when printing.
-
RE: How to setup and configure a servoposted in General Discussion
I have read that multiple times. I would only be guessing at a code to try.
I assume I assign the port in my config.g file.
What is the 1 line I need to add to my config.g to assign this port as a SERVO? I say something about heaters and configuring which I don't think I have, at least not on the expansion board or this group of ports.
And thanks for your help so far.
-
How to setup and configure a servoposted in General Discussion
I'm new to Duet and looking what should be some basic assistance.
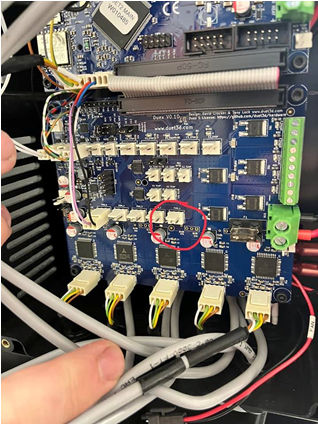
I need to configure a "RC servo" to run on my expansion board as shown below. By printer is configured with the below firmware and hardware. Can someone help with the edit of my config.g file to assign the PWM1 port shown below, and then the basic gcode command to move the servo from 1000 to 2000 which is the range in micro-seconds to drive the servo.
Here is the PWM1 ports I would like to connect my servo.
Here is my Config.g file (I think this is where I'm supposed to assign the port)
config.g