Hi!
I have converted an old Thermwood CNC to a printer with the following
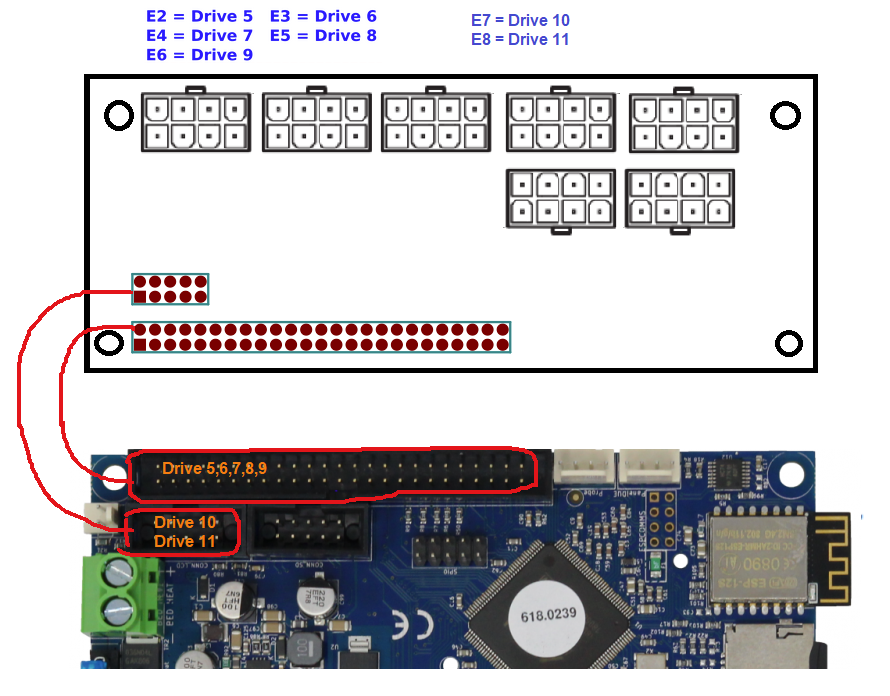
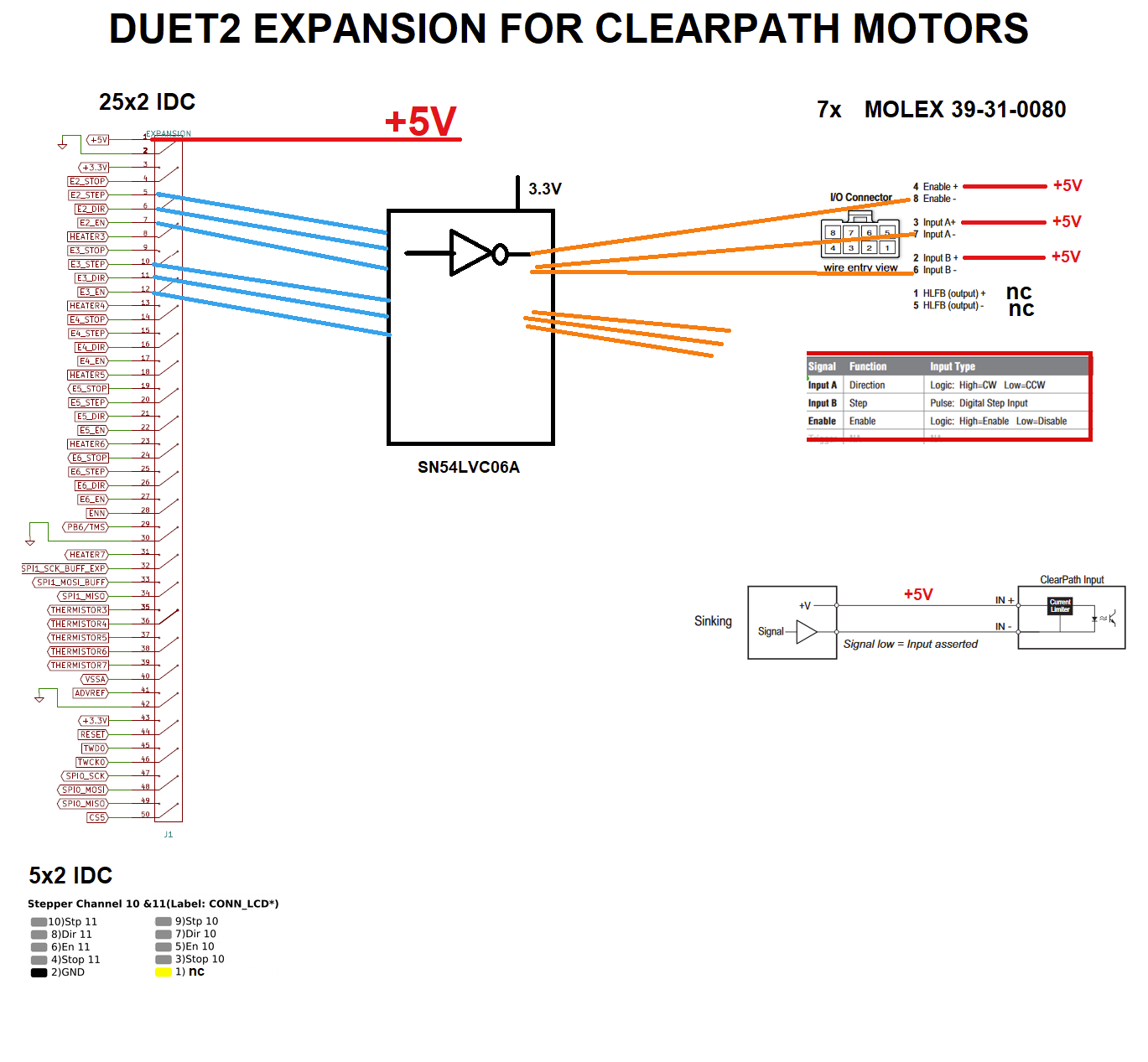
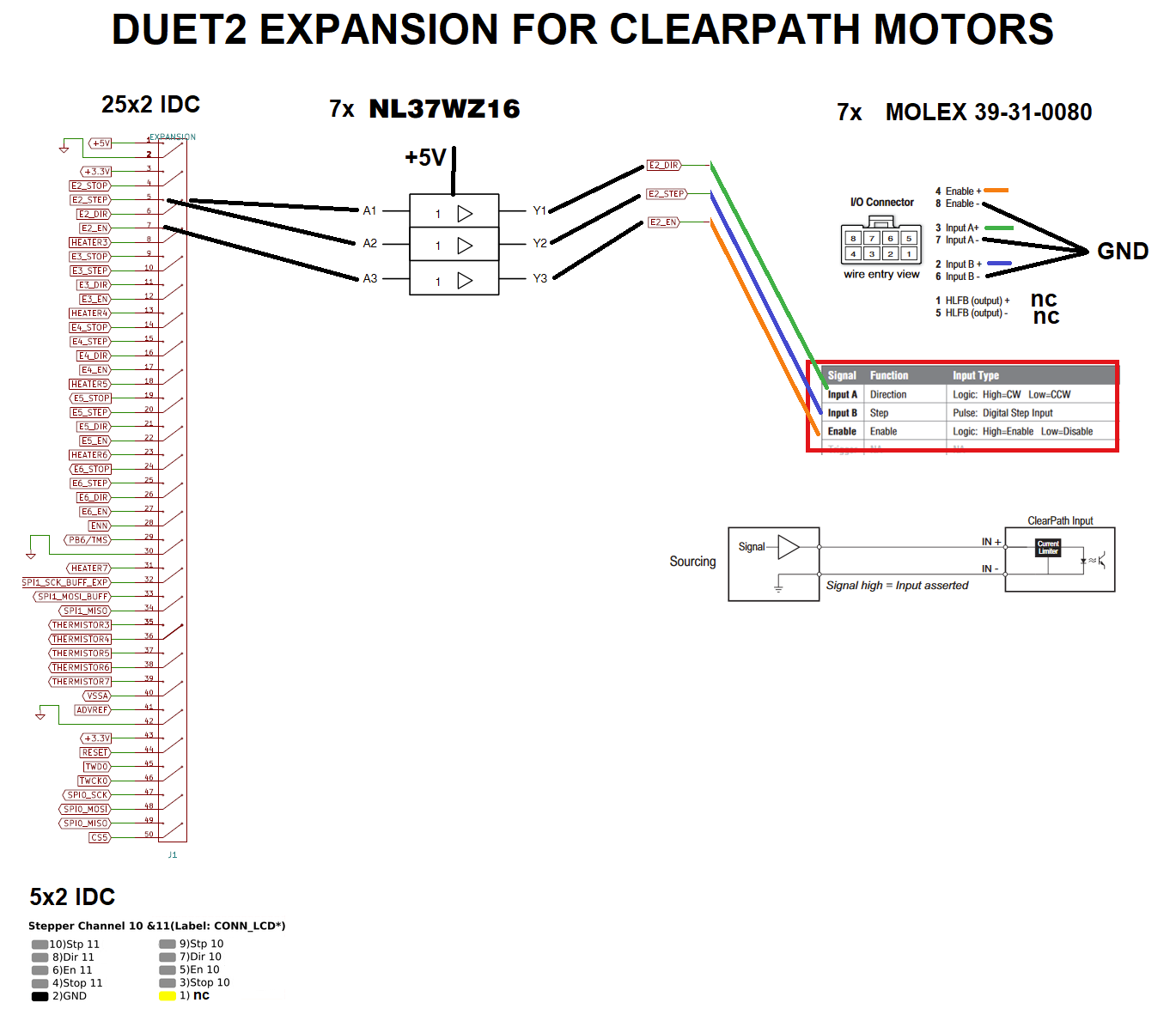
Duet2
Teknic Clearpath SDHP
Custom Z board to manage brake (pic below)
Dyze Typhoon with 1.2mm nozzle
BLTouch
Homing with the BLTouch completes perfectly by touching down to the table. I can jog fine too after homing. However when I start to test extrude (after enabling cold extrude) the BLtouch engages and retracts about 1Hz or so. Can anyone offer a sanity check on the below config?
Video of the flickering BLTouch attached.
IMG_7051.mp4
Kind regards, David.

; Configuration file for Duet2 (firmware version 3.4.5)
; executed by the firmware on start-up
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Thermwood" ; set printer name
; Network
M552 P10.0.0.2 S1 ; enable network and set IP address
M553 P255.255.255.0 ; set netmask
M554 P10.0.0.1 ; set gateway
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Drives
M569 P3 S0 ; extruder e1 goes backwards
M569 P5 S1 R1 T2.5:2.5:5:5 ; Z physical drive 5 goes forwards
M569 P6 S0 R1 T2.5:2.5:5:5 ; Y physical drive 6 goes backwards
M569 P7 S1 R1 T2.5:2.5:5:5 ; X physical drive 7 goes forwards
M584 X7 Y6 Z5 E3
M92 X900 Y900 Z320 E274 ; Set steps per mm
M350 X16 Y16 Z16 E16 I0 ; Configure microstepping without interpolation
M566 X1000 Y1000 Z1000 E120 ; Set maximum instantaneous speed changes (mm/min)
M203 X6000 Y6000 Z1000 E3000 ; Set maximum speeds (mm/min)
M201 X500 Y500 Z500 E250 ; Set accelerations (mm/s^2)
M906 X2400 Y2400 Z2400 E2400 I70 ; Set motor currents (mA) and motor idle factor
M84 S15 ; Set idle timeout..
; Axis Limits
M208 X0 Y0 Z0 S1 ; Set axis minima
M208 X1450 Y1450 Z1000 S0 ; Set axis maxima
; Endstops
M574 X1 S1 P"!xstop" ; configure active-low endstop for low end on X via pin xstop
M574 Y1 S1 P"!ystop" ; configure active-low endstop for low end on Y via pin ystop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z
; Bed Heater
M308 S0 P"e5temp" Y"thermistor" T113800 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"exp.heater7" T0 ; create bed heater output on e2heat and map it to sensor 3
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
; Typhoon Bottom Heater
M308 S1 P"spi.cs1" Y"rtd-max31865" F50 ; create sensor number 1 as a PT100 sensor in the first position on the Duet 2 daughter board connector
M950 H1 C"e0heat" T1 ; create nozzle heater output on e1heat and map it to sensor 1
M307 H1 R1.708 K0.335:0.000 D15.86 E1.35 S1.00 B0 ; auto tune settings for H1
M143 H1 S280 ; set temperature limit for heater 1 to 280C
; Typhoon Top Heater
M308 S2 P"spi.cs2" Y"rtd-max31865" F50 ; create sensor number 2 as a PT100 sensor in the second position on the Duet 2 daughter board connector
M950 H2 C"e1heat" T2 ; create pre heater heater output on e2heat and map it to sensor 2
M307 H2 R1.708 K0.335:0.000 D15.86 E1.35 S1.00 B0 ; auto tune settings for H1
M143 H2 S280 ; set temperature limit for heater 2 to 280C
; Z-Probe
M950 S8 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F200 T1000 ; set Z probe type to bltouch and the dive height + speeds
G31 X0 Y0 Z2.5 P500 ; set Z probe trigger value, offset and trigger height
M557 X35:500 Y35:500 P6 ; define mesh grid
; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H-1 ; set fan 1 value. Thermostatic control is turned off
; Z break
M950 P7 C"bedheat" ; create gpio pin 0 for brake using bed heater output
; Tools
M563 P0 D0 H1:2 S"Typhoon" ; define tool 0
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
T0