@fcwilt Ok i think i'll maybe do the Z home like this too.
Thanks you all for your patience and for your help ")
@fcwilt Ok i think i'll maybe do the Z home like this too.
Thanks you all for your patience and for your help
@infiniteloop I did it. I split the G1 in two. The G1 command works fine.
But after that the G30 command moves the bed up again and fast close to the probe. And then the probing starts.
So if the bed is not leveled the bed will crash to the probe during this first fast move.
I don't want to add some mouvement before the bed moves up fast. I want it to not do that. It should probe directly not move up first.
Like it's done when you home your printer. When homing the Z i can start it from the bottom and the bed will slowly search the probe. It wil not move fast and then start to probe.
@fcwilt Ok so i homed all axis and then i take a video from what happened.
I started the video and just after i send the G32 command.
As you can see at first the bed moves up. I don't want that at all. I want the probe to go at his place first and then the bed can moves up.
@fcwilt I already did it. And after this positioning command "G90 G1 X155 Y150 Z10" the bed did a fast move up while the bltouch is going to the first probe point then wait for the probe to be in the good place and finally did the probing work.
@fcwilt The paramater was already H5 so I tried H2 But no change. I set it back to H5.
@fcwilt said in Why first move of tue bed leveling is going up?:
Now change the H2 parameter in the G31 command to H5.
I don't find where is this command with H2.
It's here?
;;;;;;;;;; BLTouch ;;;;;;;;;;
M950 S0 C"20.io0.out" ; Create a servo pin on io0 (toolboard 1LC)
M558 P9 C"20.io0.in" H5 F240 T10800 A5 ; set Z probe type to unmodulated and the dive height + speeds
G31 P25 X-28.00 Y-13.00 Z3.700 ; set Z probe trigger value, offset and trigger height, more Z means closer to the bed
But there is no H2 parameter in the G31 command.
@infiniteloop Adding the line "G1 X5 Y10 Z20 F2000" before the G30 in the bed.g make my bed going down first. Then it goes up fast at the same time of the carriage moves in x/y to the first point.
So nothing really changed except i have a new mouvement before the problem occured.
@infiniteloop said in Why first move of tue bed leveling is going up?:
For one, you can increment the dive height.
I don't know how to do that. Can you tell me please.
@fcwilt said in Why first move of tue bed leveling is going up?:
In your homeall.g you have this:
G1 H2 Z5 F6000
Change the Z5 to Z10 and report back the behavior with this new setting.
With the bed is going more down when i home the z. But nothing changed with true bed leveling.
@infiniteloop @fcwilt I'm using a bltouch for z probe. I hommit to mention that after the bed moves up a little. The true bed leveling process continue and everything works fine. But because of that first move the probe is really close to the bed. And if the bed is not already horizontal the probe touches it and the process stops.
Here you can find my files :
config.g
;;;;;;;;;; General preferences ;;;;;
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"V-Core 3" ; Set printer name
M669 K1 ; Set printer type as CoreXY
G29 S1 ; Set Units to Millimeters
G4 S1 ; Wait for the expansion board to start
M404 N1.75 D0.4 ; Filament width and nozzle diameter
;;;;;;;;;; Network ;;;;;;;;;;
M552 S1 ; enable WiFi
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
;;;;;;;;;; Drives ;;;;;;;;;;
M569 P0.0 S1 D3 ; physical drive 0.0 goes forwards
M569 P0.1 S1 D3 ; physical drive 0.1 goes forwards
M569 P0.2 S0 D3 ; physical drive 0.2 goes forwards
M569 P0.3 S0 D3 ; physical drive 0.3 goes forwards
M569 P0.4 S0 D3 ; physical drive 0.4 goes forwards
M569 P20.0 S0 D3 ; physical drive 0.5 goes forwards
M584 X0.0 Y0.1 Z0.2:0.3:0.4 E20.0.0 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 ; set steps per mm
M906 X1000 Y1000 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
M566 X400.00 Y400.00 Z6.00 E120.00 P1 ; set maximum instantaneous speed changes (mm/min)
M203 X10800.00 Y10800.00 Z1000.00 E3600.00 ; set maximum speeds (mm/min)
M201 X3000.00 Y3000.00 Z100.00 E3600.00 ; set accelerations (mm/s^2)
;;;;;;;;;; Axis Limits ;;;;;;;;;;
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X310 Y300 Z290 S0 ; set axis maxima
;;;;;;;;;; Endstops ;;;;;;;;;;
M574 X1 S1 P"io1.in" ; configure active high endstops
M574 Y2 S1 P"io0.in" ; configure active high endstops
M574 Z1 S2 ; configure Z-probe endstop for low end on Z
M671 X-4.5:150:304.5 Y-4.52:305:-4.52 S5 ; define positions of Z leadscrews or bed levelling screws
M557 X20:280 Y20:280 P5 ; define 5x5 mesh grid
;;;;;;;;;; Heaters ;;;;;;;;;;
M308 S0 P"temp0" Y"thermistor" T100000 B3950 A"Bed" ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S110 ; set temperature limit for heater 0 to 110C
M307 H0 B0 R0.855 C274.9 D3.97 S1.00 ; PID parameter
M308 S1 P"20.temp0" Y"PT1000" A"Hotend"
M950 H1 C"20.out0" T1 ; create nozzle heater output on out0 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S250 ; set the maximum temperature in C for heater
M307 H1 B0 R2.320 C237.4 D5.37 S1.00 V24.1
;;;;;;;;;; Fans ;;;;;;;;;;
M950 F0 C"20.out2+out2.tach" Q5000 ; create fan 0 on pin out3 and set its frequency
M106 P0 C"Hotend Fan" S0 H1 T45 ; set fan 0 name and value. Thermostatic control turned on for Hotend
M950 F1 C"20.out1" Q5000 ; create fan 1 on pin out4 and set its frequency
M106 P1 C"Layer Fan" S0 H-1 ; set fan 1 name and value. Thermostatic control is turned off
;;;;;;;;;; Tools ;;;;;;;;;;
M563 P0 D0 H1 F1 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
;;;;;;;;;; EVA 2 / BMG / Mosquitto ;;;;;;;;;;
M92 E830 ; set extruder steps per mm, 0.9 angle/step (LDO Pancake)
M906 E800 ; set extruder motor current (mA) and idle factor in per cent
;;;;;;;;;; BLTouch ;;;;;;;;;;
M950 S0 C"20.io0.out" ; Create a servo pin on io0 (toolboard 1LC)
M558 P9 C"20.io0.in" H5 F240 T10800 A5 ; set Z probe type to unmodulated and the dive height + speeds
G31 P25 X-28.00 Y-13.00 Z3.700 ; set Z probe trigger value, offset and trigger height, more Z means closer to the bed
;;;;;;;;;; Acclerometer ;;;;;;;;;;
;M955 P20.0 I10 ; specify orientation of accelerometer on Toolboard 1LC with CAN address 121
;;;;;;;;;; Pressure Advance ;;;;;;;;;;
M572 D0 S0.10
homeall.g
M280 P0 S160 ; Precautionary alarm release (BLTouch)
M280 P0 S90 ; Ensure the pin is raised (BLTouch)
G91 ; relative positioning
; G1 H2 Z5 F6000 ; lift Z relative to current position (bed goes down)
G1 H1 X-999 Y999 F1800 ; move quickly to X axis endstop and stop there (first pass)
G1 H1 X-999 F1800 ; move quickly to X axis endstop and stop there (first pass)
G1 H1 Y999 F1800 ; move quickly to Y axis endstop and stop there (first pass)
G1 H0 X5 Y-5 F6000 ; go back a few mm
G1 H1 X-999 Y999 F100 ; move quickly to X axis endstop and stop there (first pass)
G1 H1 X-999 F100 ; move quickly to X axis endstop and stop there (first pass)
G1 H1 Y999 F100 ; move quickly to Y axis endstop and stop there (first pass)
G90 ; absolute positioning
G1 X150 Y150 F10000 ; go to first probe point
G30 ; home Z by probing the bed
G91 ; relative positioning
G1 Z5 F1000 ; lift Z relative to current position (bed goes down)
G90 ; absolute positioning
deployprobe.g
; deployprobe.g
; Called to deploy a physical Z probe
;
M280 P0 S10 ; Deploy the BLTouch pin
retractprobe.g
; retractprobe.g
; Called to retract a physical Z probe
;
M280 P0 S90 ; Retract the BLTouch pin
@fcwilt But i'm printing and it works fine! What can be wrong in the configuration or wiring?
Hello,
When i execute a true bed leveling (G32) the bed goes up at the same time the carriage come to the first point. Then the bed wait for the carriage and finish to goes up.
The fact that the bed goes up at the same that the carriage moves had already caused me some crash from to the z probe to the bed.
The carriage should move first then the bed should goes up. Not both at the same time.
Is there a way to change that?
Here is my bed.g if that may help :
M561 ; clear any bed transform
G30 P0 X5 Y10 Z-99999 ; probe near a leadscrew
G30 P1 X150 Y290 Z-99999 ; probe near a leadscrew
G30 P2 X290 Y10 Z-99999 S3 ; probe near a leadscrew and calibrate 3 motors
NB : The bed has three z motors.
@deckingman Thanks for your explanation. I did the calculation too but somehow i miss something...
Thanks a lot everything is working fine now
Hello,
Can someone explain me why my cube is not... a cube...

Leadscrew are TR8*8 and this is my parameter in config.g :
M92 X80.00 Y80.00 Z800.00
Is this line false? Is it something else?
@dc42 Thanks everything works fine now
No one can help me? As i said the problem occured when i load and start a gcode.
The drives are in error even before they move.
While the bed&hotend are warming up the errors start to appear.
But when i warm them up in manual or when i move in manuel i have no problem at all.
@gixxerfast I have only one line in my startup sequence and it's this one :
START_PRINT EXTRUDER_TEMP=[first_layer_temperature] BED_TEMP=[first_layer_bed_temperature]
I didn't add this line, it was there at the begining.
And it gives me an error when i import the gcode but i don't think it's the problem.
@gixxerfast said in Problem with high temperature in the drivers:
are you tuning the steppers for stealhchop somewhere in you print start or homing sequence?
I don't know... Where can i check this?
I check for M17 in my config.g in all homing.g files and in the gcode and i didn't found any. Is there somewhere else i have to check.
@dc42 I did some manual move. I did some homing. Everything is alright. No error message and i can "touch" the drivers.
The strange thing is that when i load my gcode nothing move but the drivers get hot and the errors appears.
Here is the Gcode if you want look at it :
FilamentClipV2_0.2mm_PLA_20m.gcode
@dc42 They are really hot, i cannot leave my finger on it...
Here is the new M122 :
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.3 (2021-06-15 21:46:11) running on Duet 3 Mini5plus WiFi (standalone mode)
Board ID: 0F53H-W396U-D65J0-40KMJ-JD03Z-RY85Y
Used output buffers: 3 of 40 (26 max)
=== RTOS ===
Static ram: 102724
Dynamic ram: 106196 of which 100 recycled
Never used RAM 34684, free system stack 134 words
Tasks: NETWORK(ready,15.6%,244) HEAT(delaying,0.0%,348) Move(notifyWait,0.1%,283) CanReceiv(notifyWait,0.0%,773) CanSender(notifyWait,0.0%,367) CanClock(delaying,0.0%,338) TMC(notifyWait,0.7%,106) MAIN(running,82.7%,408) IDLE(ready,0.0%,29) AIN(delaying,0.8%,264), total 100.0%
Owned mutexes: WiFi(NETWORK)
=== Platform ===
Last reset 01:46:59 ago, cause: software
Last software reset at 2022-01-22 18:00, reason: User, GCodes spinning, available RAM 34900, slot 2
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00000000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
MCU revision 3, ADC conversions started 6419710, completed 6419708, timed out 0, errs 0
Step timer max interval 1455
MCU temperature: min 34.3, current 44.9, max 45.1
Supply voltage: min 23.8, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Driver 0: position 48076, standstill, SG min/max 0/26, read errors 0, write errors 0, ifcnt 43, reads 45295, writes 5, timeouts 0, DMA errors 0
Driver 1: position 1200, standstill, SG min/max 0/28, read errors 0, write errors 0, ifcnt 43, reads 45295, writes 5, timeouts 0, DMA errors 0
Driver 2: position -2, standstill, SG min/max 0/18, read errors 0, write errors 0, ifcnt 45, reads 45292, writes 7, timeouts 0, DMA errors 0
Driver 3: position 0, standstill, SG min/max 0/14, read errors 0, write errors 0, ifcnt 45, reads 45293, writes 7, timeouts 0, DMA errors 0
Driver 4: position 0, standstill, SG min/max 0/22, read errors 0, write errors 0, ifcnt 45, reads 45293, writes 7, timeouts 0, DMA errors 0
Driver 5: position 0, assumed not present
Driver 6: position 0, assumed not present
Date/time: 2022-01-22 19:47:33
Cache data hit count 4294967295
Slowest loop: 138.37ms; fastest: 0.08ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 3.6ms, write time 4.0ms, max retries 0
=== Move ===
DMs created 83, maxWait 6067306ms, bed compensation in use: mesh, comp offset 0.000
=== MainDDARing ===
Scheduled moves 2, completed moves 2, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 1], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1, chamberHeaters = -1 -1
Heater 0 is on, I-accum = 0.3
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== CAN ===
Messages queued 8107, received 10743, lost 0, longest wait 1ms for reply type 4012, peak Tx sync delay 173, free buffers 17 (min 15), ts 4303/4303/0
Tx timeouts 0,0,0,0,0,0
=== Network ===
Slowest loop: 200.75ms; fastest: 0.06ms
Responder states: HTTP(2) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8
- WiFi -
Network state is active
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 1
WiFi firmware version 1.26
WiFi MAC address f0:08:d1:02:e5:a2
WiFi Vcc 3.35, reset reason Power up
WiFi flash size 2097152, free heap 19968
WiFi IP address 192.168.1.16
WiFi signal strength -52dBm, mode 802.11n, reconnections 0, sleep mode modem
Clock register 00002002
Socket states: 0 4 0 0 0 0 0 0
@dc42 there is the whole response to these commands:
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.3 (2021-06-15 21:46:11) running on Duet 3 Mini5plus WiFi (standalone mode)
Board ID: 0F53H-W396U-D65J0-40KMJ-JD03Z-RY85Y
Used output buffers: 3 of 40 (11 max)
=== RTOS ===
Static ram: 102724
Dynamic ram: 105980 of which 100 recycled
Never used RAM 34900, free system stack 186 words
Tasks: NETWORK(ready,15.3%,259) HEAT(delaying,0.0%,348) Move(notifyWait,0.1%,362) CanReceiv(notifyWait,0.0%,773) CanSender(notifyWait,0.0%,371) CanClock(delaying,0.0%,347) TMC(notifyWait,0.6%,106) MAIN(running,83.1%,426) IDLE(ready,0.0%,29) AIN(delaying,0.8%,264), total 100.0%
Owned mutexes: WiFi(NETWORK)
=== Platform ===
Last reset 01:32:38 ago, cause: software
Last software reset at 2022-01-22 18:00, reason: User, GCodes spinning, available RAM 34900, slot 2
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00000000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
MCU revision 3, ADC conversions started 5558984, completed 5558984, timed out 0, errs 0
Step timer max interval 1328
MCU temperature: min 33.8, current 34.3, max 34.8
Supply voltage: min 24.0, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Driver 0: position 0, standstill, SG min/max 0/0, read errors 0, write errors 1, ifcnt 38, reads 30403, writes 12, timeouts 0, DMA errors 0
Driver 1: position 0, standstill, SG min/max 0/0, read errors 0, write errors 1, ifcnt 38, reads 30403, writes 12, timeouts 0, DMA errors 0
Driver 2: position 0, standstill, SG min/max 0/0, read errors 0, write errors 1, ifcnt 38, reads 30403, writes 12, timeouts 0, DMA errors 0
Driver 3: position 0, standstill, SG min/max 0/0, read errors 0, write errors 1, ifcnt 38, reads 30402, writes 12, timeouts 0, DMA errors 0
Driver 4: position 0, standstill, SG min/max 0/0, read errors 0, write errors 1, ifcnt 38, reads 30403, writes 12, timeouts 0, DMA errors 0
Driver 5: position 0, assumed not present
Driver 6: position 0, assumed not present
Date/time: 2022-01-22 19:33:12
Cache data hit count 4294967295
Slowest loop: 5.79ms; fastest: 0.12ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 3.5ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 83, maxWait 0ms, bed compensation in use: mesh, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== CAN ===
Messages queued 50045, received 66712, lost 0, longest wait 2ms for reply type 6049, peak Tx sync delay 192, free buffers 17 (min 16), ts 27795/27794/0
Tx timeouts 0,0,0,0,0,0
=== Network ===
Slowest loop: 10.40ms; fastest: 0.00ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8
- WiFi -
Network state is active
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 0
WiFi firmware version 1.26
WiFi MAC address f0:08:d1:02:e5:a2
WiFi Vcc 3.35, reset reason Power up
WiFi flash size 2097152, free heap 23120
WiFi IP address 192.168.1.16
WiFi signal strength -51dBm, mode 802.11n, reconnections 0, sleep mode modem
Clock register 00002002
Socket states: 4 0 0 0 0 0 0 0
M115
FIRMWARE_NAME: RepRapFirmware for Duet 3 Mini 5+ FIRMWARE_VERSION: 3.3 ELECTRONICS: Duet 3 Mini5plus WiFi FIRMWARE_DATE: 2021-06-15 21:46:20
Hello,
I just finished my 3d printer.
Everything works fine, i can move all the motors. But when i start a print, this happened :
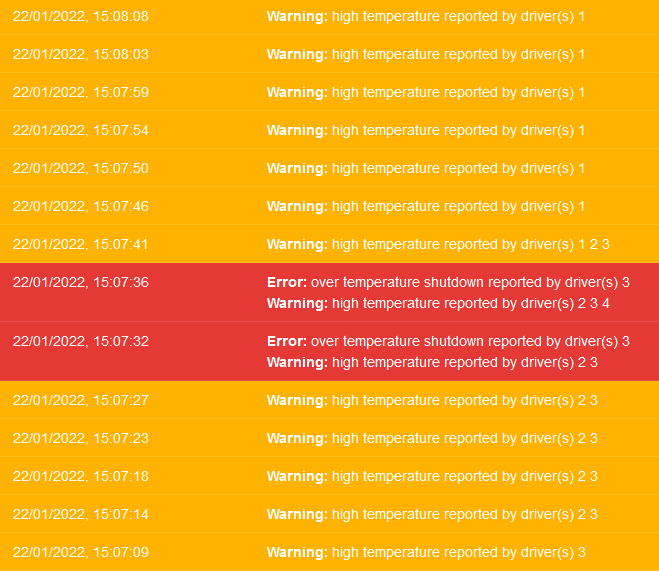
The motors haven't even move when this happened. It's at the really beggining of the print.
I believe that the problem is in my slicer not in my config.g. Do you think it is possible? Which parametrer should i check?
Here is my drives conf :
;;;;;;;;;; Drives ;;;;;;;;;;
M569 P0.0 S1 D3 ; physical drive 0.0
M569 P0.1 S1 D3 ; physical drive 0.1
M569 P0.2 S0 D3 ; physical drive 0.2
M569 P0.3 S0 D3 ; physical drive 0.3
M569 P0.4 S0 D3 ; physical drive 0.4
M569 P20.0 S0 D3 ; physical drive 20.0 (on toolboard)
M584 X0.0 Y0.1 Z0.2:0.3:0.4 E20.0.0 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z800.00 ; set steps per mm
M906 X1000 Y1000 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
M566 X400.00 Y400.00 Z6.00 E120.00 P1 ; set maximum instantaneous speed changes (mm/min)
M203 X10800.00 Y10800.00 Z1000.00 E3600.00 ; set maximum speeds (mm/min)
M201 X3000.00 Y3000.00 Z100.00 E3600.00 ; set accelerations (mm/s^2)
I'm using Duet 3 mini 5 + with Duet 3 toolboard 1LC.