m669 custom movement of the extruder axis
-
tell me how to set the formula( coefficients) for the extruder motor. I want to implement the transfer of rotation of the extruder, the motor standing on the frame with a belt, on the kinematics of CoreXY. to do this, you need to compensate for the movement along the X and Y axes. I have already implemented this on another firmware, but I would like to make support for RRF as well. the m669 command gives access only to XYZUV and not to E, well, or I did not understand how to register it
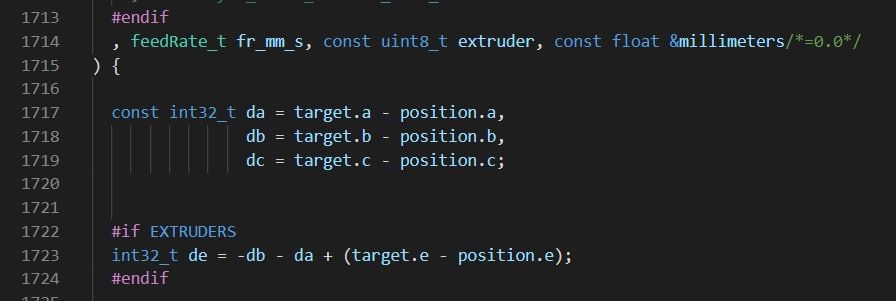
here is the formula from the marlin firmware.
in my view, it looks like this:
M669 X1:0:0 Y0:1:0 Z0:0:1 E-1 : -1 :0