Need help figuring out using 60 Teeth pulley to drive my Y axis
-
Good evening,
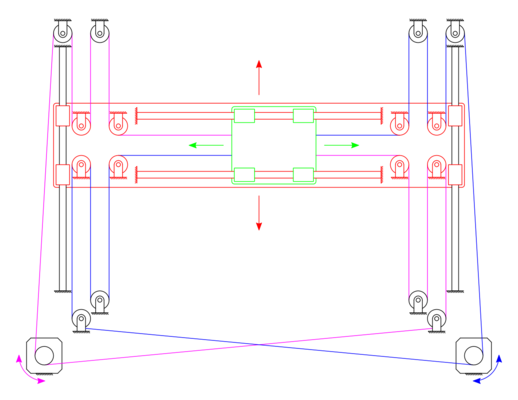
I am working on a CoreXZ bed-slinger powered by Duet. So far I managed to make good progress on CoreXZ mechanics.
On the Y axis however, I'd love to be able to use 60 teeth pulley & idler for design purposes. This would allow me to save space and box things up nicely.
From what I figure:
- 20 teeth pulley has an outer diameter of ~16 mms.
- 60 teeth pulley stands at 38 mms.
- And I can estimate the weight of my bed assembly + the weight it should be able to carry
This translates to a 2.4x distance increase from the shaft. And this is where I get lost as my knowledge in physics and torque calculation is limited.
1st) Could you please help me with the following?
- How can I figure out the torque value I should be looking for when buying a motor so that I can safely use 60T 2GT pulleys in order to drive the Y axis?
2nd) Is my calculation below correct (excluding friction, which is sort of OK I hope for this application)?
- Using a 40 N-cm stepper, I get a torque rating of 4.5 kg-cm.
- At 8mms from the shaft (16mm OD 20 T pulley), the value jumps to 5.6 kgs
(4.5 * 10)/8=5.6) - However at 19 mms from the shaft (38mm 60 T pulley), this would go down to 2.36 kgs
(4.5 * 10)/19=2.36)
Therefore the motor would be limited to safely moving ~2kg
Thanks in advance for your help and reminding me physics.
One picture's worth a thousand words demo:
-
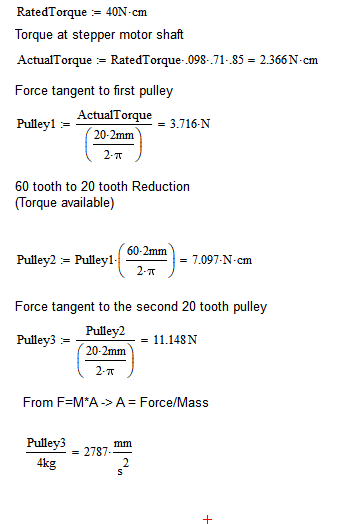
- Force = Mass times acceleration. Understanding acceleration is a big piece of the puzzle
- Torque drops to 71% when using microstepping
- To keep motion lag under 1/16 microstep during acceleration, multiply by 9.8%
- Stepper motors in our cases are typically run at 85% the rated current - multiply rated torque by 85%
Ok, CoreXZ - you have the stepper motor, with the 20 tooth pulley on it right? That is then belted to the 60 tooth pulley correct?
I guess I'm not entirely sure where the reduction is taking place - but I'll mock up something else, which might point you in the right direction.
Good reading here:
https://forum.duet3d.com/topic/6/stepper-motors-for-corexy/4
https://forum.duet3d.com/topic/6853/maximum-acceleration-calculatorA tool:
https://wilriker.github.io/maximum-acceleration-calculator/ -
@Philn said in Need help figuring out using 60 Teeth pulley to drive my Y axis:
On the Y axis however, I'd love to be able to use 60 teeth pulley & idler for design purposes. This would allow me to save space and box things up nicely.
I'm really struggling to imagine what you have in mind here. Can you post a sketch or something because I can't figure out how using a large pulley on a motor is going to save space.
-
I apologise for the confusion. I was so convinced that it was all clear
")
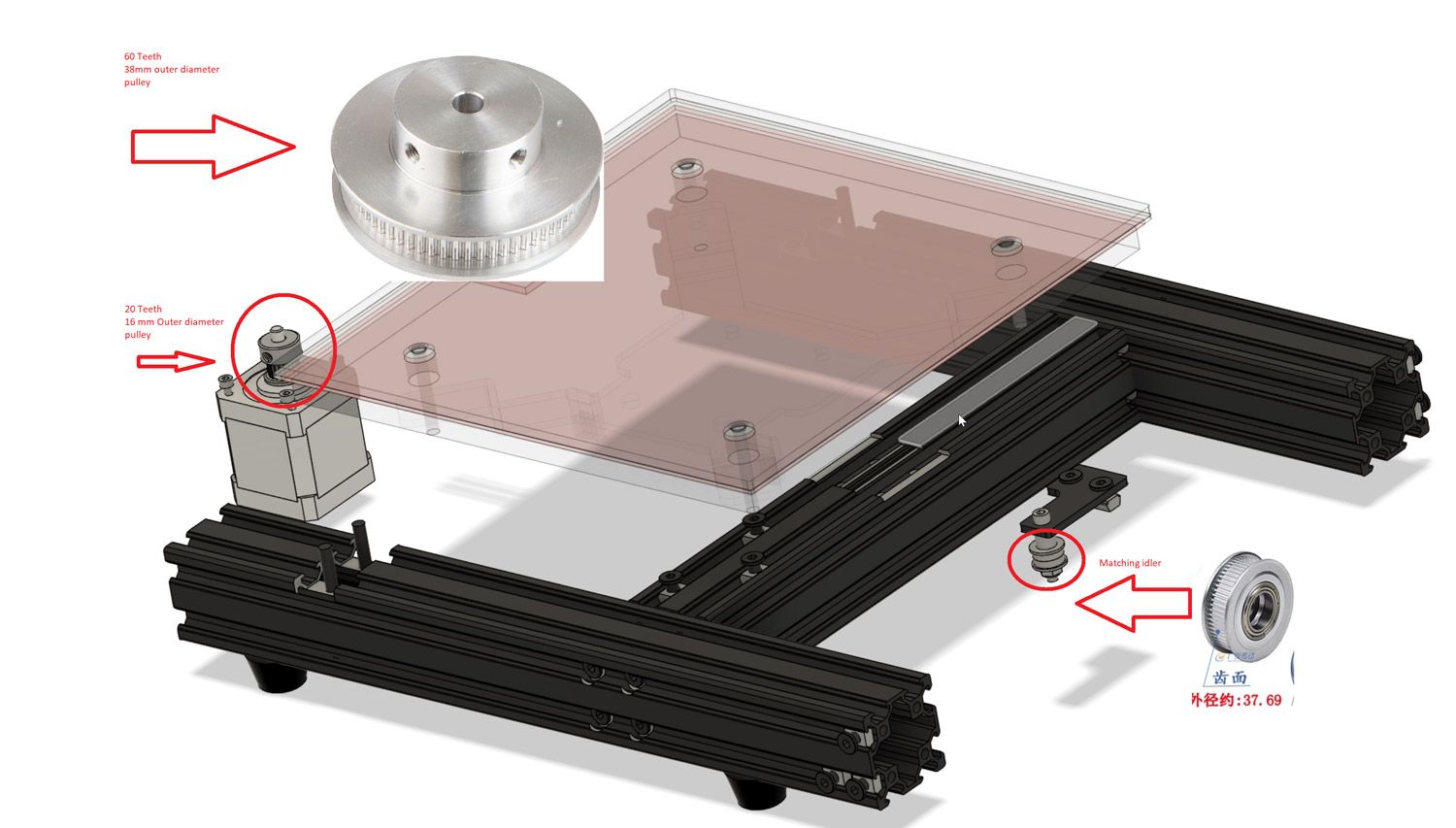
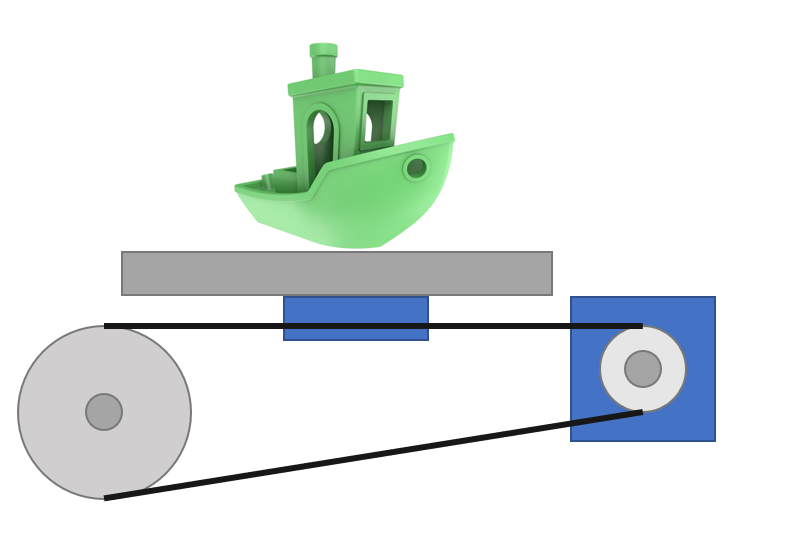
Here is a picture demonstrating what I would have liked to explain:'
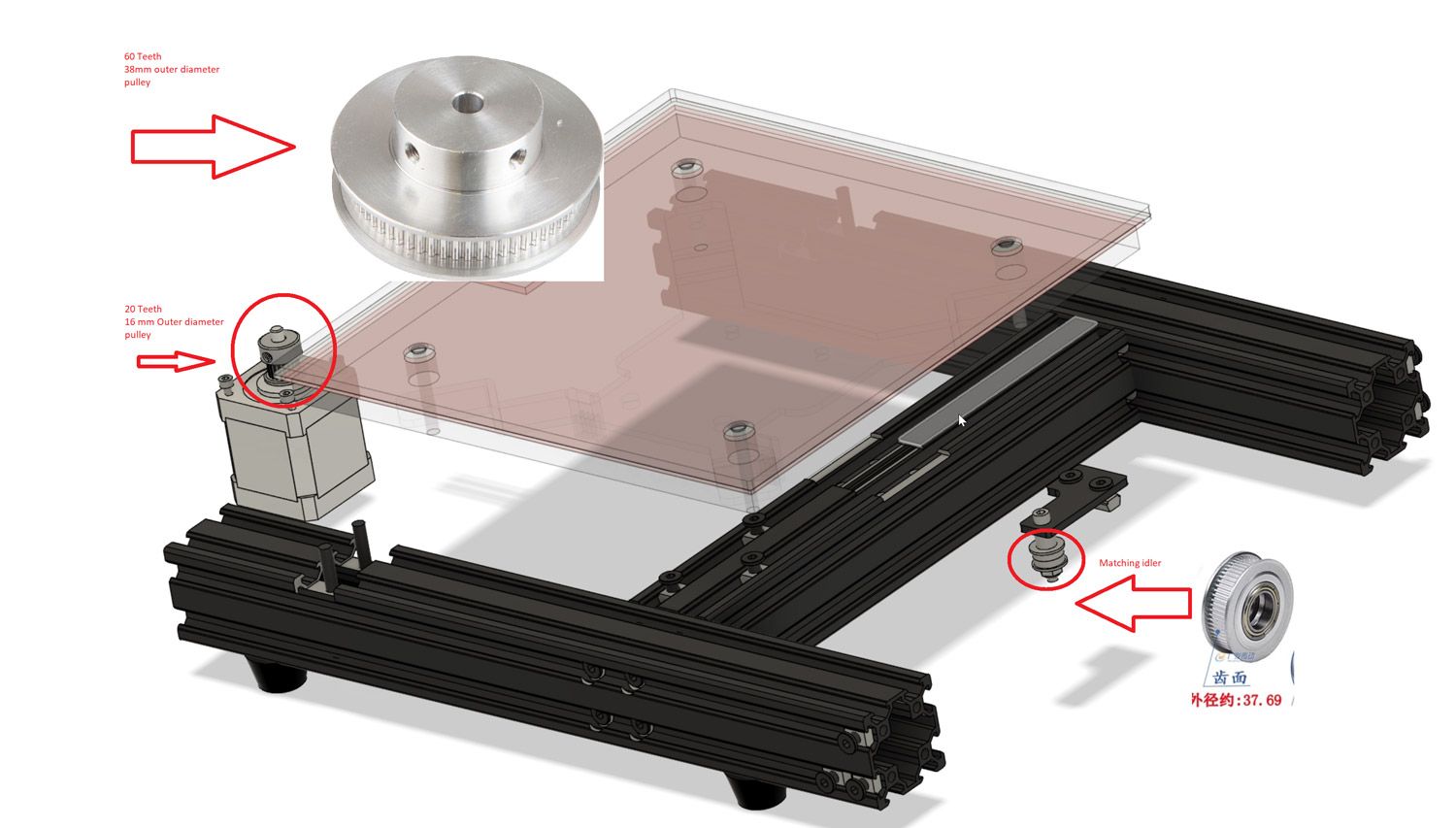
Current Y axis is a "typical" setup.
Nema 17 with 16mm pulley with matching idler.I want to use instead a 38mm pulley with matching 38mm idler.
My issue is, I assume, I will lose force / torque when moving the bed?
P.S.
Saving space is linked to the enclosure. If I use larger pulley / idler combo, I will be able to position things differently and run the belt around the rail on which the bed will be riding. Eitherway I am very curious
about learning these torque, force etc. Most common printers from China, even Prusa use 20 teeth pulleys and I wonder what would happen with a larger set. -
Hello,
I feel humbled that you have taken time to explain all this. Thank you very much. This is some truly important information that I need to learn.
However I am OK with the XZ motion and my question is regarding the Y axis / bed movement.
I attached an immage to my above reply.
Do you mind taking a look?
There is no reduction at all. I just want to use 60 Teeth 38mm pulley / idler instead of a 20 teeth 16mm diameter one and due to the larger diameter, I am afraid my motor won't be able to move the same amount of mass.
So I would like to figure out if I need to get a more powerful motor or if its good enough.
Does that make sense?
Once again, thank you and I will study the things you shared and the links you provided. Cheers
-
@Philn Happy to help!
So in this case, the bed moves like a typical "bed-slinger," cool! Because the bed is moving in the horizontal direction, we do not need to worry about gravity (as a form of constant acceleration).
Like you said at the start - we are planning on excluding friction, which is a a safe assumption for the most part with our setup. Because we are basically ignoring friction and not worried about gravity, we are now worried about how fast we can move the bed side to side based on how the motor is spec'd out. We also need to know how heavy the bed is!
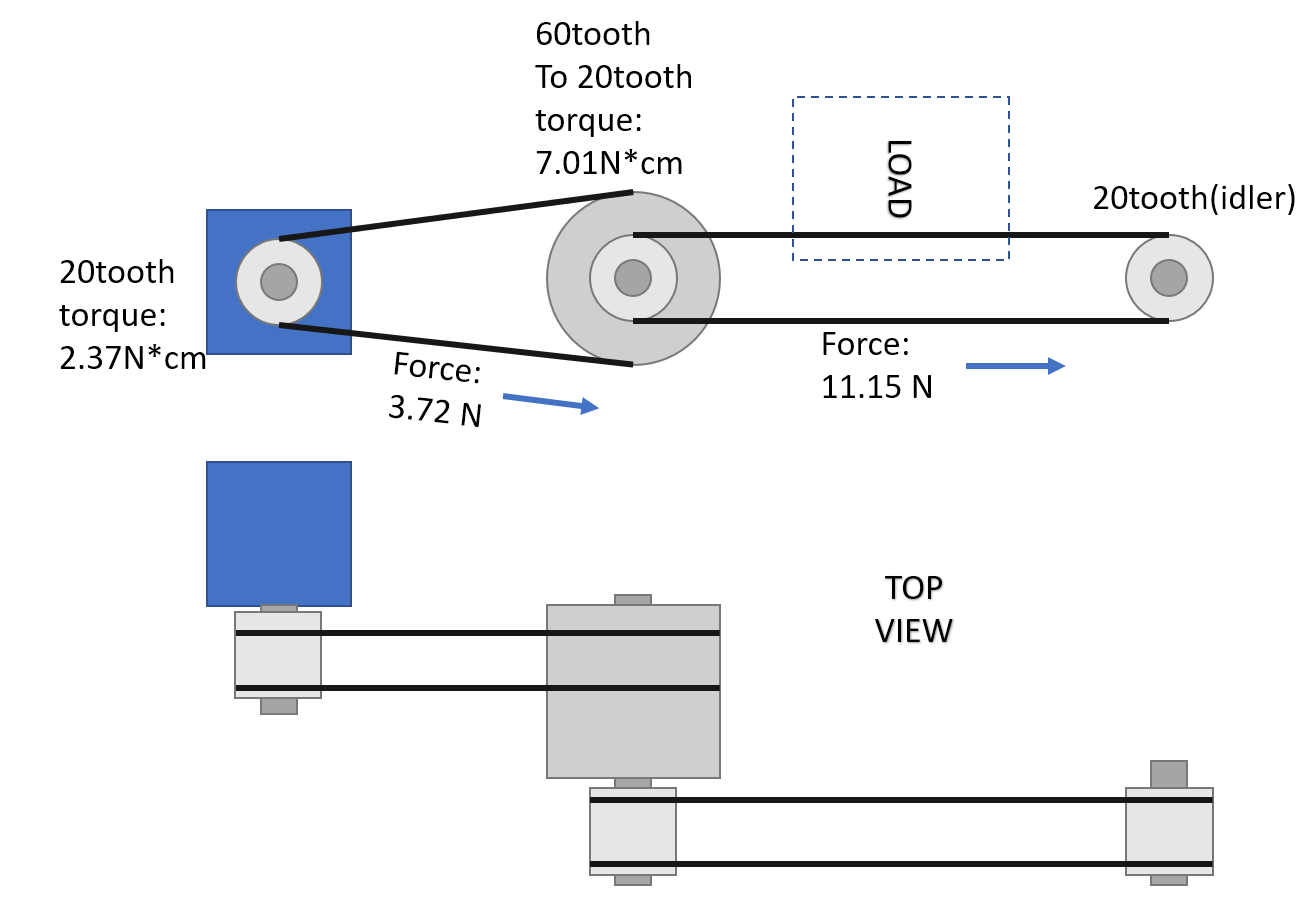
Something to consider before we dive into math - you can totally mix and match pulleys and idlers, so long as the side of the belt that drives the motion is tangent to both the drive and idler pulley.
Ok, some math. We have two cases - 20 tooth vs 60 tooth
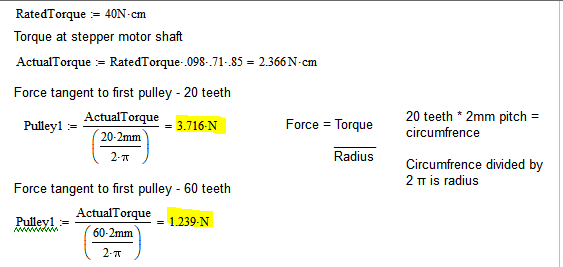
The 60 tooth pulley offers less force along the belt (and thus motion of the bed) than the 20 tooth, which might not seem intuitive - but bigger doesn't mean stronger by itself.
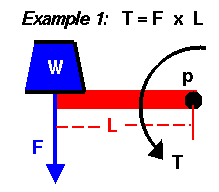
Our shaft is "p". For a given distance "L", which is our pulley radius, a smaller "W" or Force is needed if the radius is longer. Looking at it that way makes more sense perhaps.So, for those forces, what could our acceleration values be?
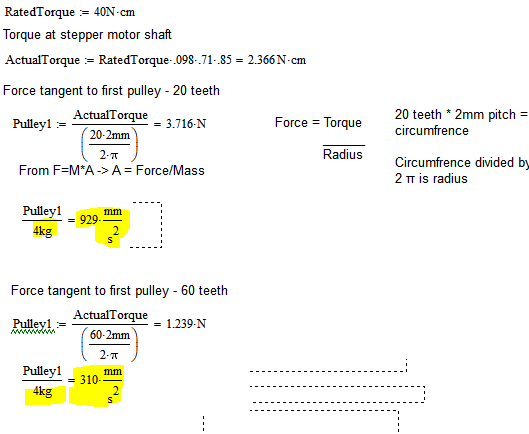
20teeth @ 929 mm/s^2 makes way more sense to me than 310mm/s^2. The motor could move the bed no problem in both cases, but from no movement to movement, the 60tooth would accelerate up to speed much slower.
Another item to be concerned about is the steps/mm for the bed - essentially how "detailed" you can print. A typical stepper is 1.8°, meaning 200 "ticks" for 360°. We typically run them with 1/16 micro stepping on the Duet. Divided by our pulley size (teeth times pitch, at 2mm):
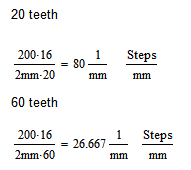
With 60 teeth, the steps/mm is really, really, really low. Most printers operate between 80-100 steps a mm (like the 20 tooth!)). -
@Philn said in Need help figuring out using 60 Teeth pulley to drive my Y axis:
Saving space is linked to the enclosure. If I use larger pulley / idler combo, I will be able to position things differently and run the belt around the rail on which the bed will be riding.
So on the basis that for a given torque, the force that you can apply to move the mass will be lower as the pulley diameter increases, then you are much better off using a smaller pulley. In a nutshell, torque is force x distance (from the centre line of the pulley). So if you increase the distance, you reduce the force available and vice versa.
The positional accuracy will also suffer with a 60 tooth pulley (120mm per revolution using a 2mm pitch belt). But why not use another idle to space the belt to where you want it to run? If you use a 16mm diameter pulley on the motor, then position another 16mm idles to the side of it so that there is 4mm spacing between them, that gives you the 38mm that you looking for without the loss of torque and positional accuracy.
-
Actually its force/distance.
If it was force*distance then increasing the diameter of the pulley would increase torque
")
If you really really want to use a 60 tooth pulley, it will work, you'll just have to limit the speed and acceleration of the bed.
(People used to build 3D printers from literal plumbing supplies, anything will work if your standards are low enough!).Large pulleys are normally used by people aiming for higher top speeds... (I'm running a high speed machine with a very heavy head, using 40 tooth pulleys on NEMA23's). But that's because steppers really struggle with high RPM's.
Without knowing your exact design criteria I can't tell you if running a 60 tooth pulley will give you enough resolution, I'm not convinced that its as critical as most people say (and the original RepRap spec was only 0.1mm positioning!).
But it sounds like designing and building the machine is as important as the final results... So I'd say just go ahead and see what results you get.
You can always redesign things and move stuff around later. -
@theruttmeister said in Need help figuring out using 60 Teeth pulley to drive my Y axis:
Actually its force/distance.
Boll*cks - or as this is a family friendly forum - I must politely disagree.
The unit of torque is N.m. The "." implies multiplication and is sometimes omitted. Were it force/distance then it would be N/m. Stepper motor torque is often quoted as N.cm, or Kg.cm but it's always force multiplied by distance and never force divided by distance.
So we have T(orque) = F(orce) x d(istance). In this case, the maximum motor torque can be considered to be fixed. Therefore, if the distance were to be doubled then the force would need to be halved for that equation to remain true and to arrive at the same torque.
If it was force*distance then increasing the diameter of the pulley would increase torque
If the force remains the same, then that is true - it's called leverage.
But we know that the motor is only capable of a certain torque. We can't magically increase it by using different size pulleys. Therefore, as I stated above, if the torque is fixed amount, and if one increases the pulley diameter, then the force must reduce by the same proportion.
-
@deckingman said in Need help figuring out using 60 Teeth pulley to drive my Y axis:
@theruttmeister said in Need help figuring out using 60 Teeth pulley to drive my Y axis:
Actually its force/distance.
If it was force*distance then increasing the diameter of the pulley would increase torque
, if the torque is fixed amount, and if one increases the pulley diameter, then the force must reduce by the same proportion.
We are saying the same thing...
I'm just talking about converting from the available torque of the motor to the force applied to the belt.
So I should have said: torque/distance = force on the belt.
I didn't read your post closely enough. Apologies for any offence given.