The printer for duet 3 mini is noisy.
-
Hello.
Can you tell me how the interpolation for duet 3 mini works and is configured?
I have 2 identical printers. Completely. Initially, they were equipped with SKR1,3/marlin and tms2209.
On one of the printers I replaced SKR1.3 with duet 3 mini. the first thing I noticed was the increased noise when working compared to SKR1,3. The settings are the same. The current is the same. there is a feeling that interpolation does not work. There seems to be no change when switching the M350 I0/I1 parameter.
Also, the settings of the stealth chop differ in sound. Both are configured to switch to the spread cycle after 150mm/s. And in general, the duet printer works quieter on the spread cycle than on the stealth chop.
Maybe there are any additional settings? How to make it as quiet as on SKR?
Duet 3 mini v1
RRF 3.3 -
This post is deleted! -
@vladimir_u please post the config.g
-
@pcr Here is my config.g
; Configuration file for Duet 3 Mini 5+ (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.5 on Sun Oct 31 2021 23:40:16 GMT+0300 (Москва, стандартное время) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"HBULTI" ; set printer name M669 K1 ; select CoreXY mode ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S1 ; physical drive 0.0 goes forwards M569 P0.1 S1 ; physical drive 0.1 goes forwards M569 P0.2 S1 ; physical drive 0.2 goes forwards M569 P0.3 S1 ; physical drive 0.3 goes forwards M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation ;M350 X16 Y16 Z16 E16 I0 ; test M92 X80.00 Y80.00 Z1600.00 E691.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X12000.00 Y12000.00 Z300.00 E4500.00 ; set maximum speeds (mm/min) M201 X3000.00 Y3000.00 Z100.00 E1500.00 ; set accelerations (mm/s^2) M906 X700 Y700 Z700 E300 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X200 Y200 Z200 S0 ; set axis maxima ; Endstops M574 X1 S3 ; configure sensorless endstop for low end on X M574 Y1 S3 ; configure sensorless endstop for low end on Y M574 Z1 S1 P"io5.in" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin io5.in M569 P0.0 V2000 M569 P0.1 V2000 M569 P0.2 V40 ; Z ;M569 P0.0 V20 ; test ;M569 P0.1 V20 ; test ; Z-Probe M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed M557 X15:190 Y15:195 S20 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 ;M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit ;M307 H0 B0 R0.649 C315.8 D2.82 S1.00 ;V12.1 ; my bed settings 80 M307 H0 B0 R0.645 C295.1 D2.17 S1.00 ;V12.1 ; my bed settings 100 M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M950 H0 Q10 M308 S1 P"temp1" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"out5" Q15000 M106 P2 T20:31 H100:101:102 ;S200 ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined M918 P2 E-4 F2000000 ; Fysetc 12864mini M150 X2 R255 U0 B0 P255 S1 F1 ; display led M150 X2 R0 U255 B0 P255 S1 F1 ; left encoder led M150 X2 R0 U255 B0 P255 S1 F0 ; right encoder led M912 -
Change this
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.3 S1To
M569 P0.0 S1 D3 V20 ; physical drive 0.0 goes forwards
M569 P0.1 S1 D3 V20 ; physical drive 0.1 goes forwards
M569 P0.2 S1 D3 V20 ; physical drive 0.2 goes forwards
M569 P0.3 S1 D3 V20 -
@vladimir_u and delete this
M569 P0.0 V2000
M569 P0.1 V2000
M569 P0.2 V40 ; Z
;M569 P0.0 V20 ; test
;M569 P0.1 V20 ; test -
@pcr Hello. There is no difference between these settings and the settings with which I experimented. at V20 it works noisy. When installed, V2000 works just as noisy, but there is a hiss when driving. The overall noise level does not change much the same.
I read on the forum that many are faced with the problem of stealth chop. Somewhere I saw that at startup some stealth chop tuning is required.
steppers-stepperonline 17hs19-2004s1-1,8 -
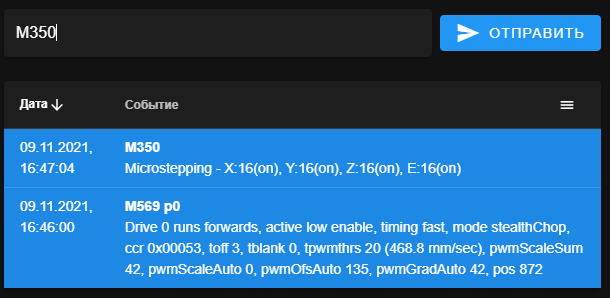
When changing the ai parameter I the M350 command from 1 to 0, no changes are made. There is a feeling that interpolation does not work.
-
What current settings did you have in Marlin? It might help if you post your Marlin configuration file so we can see how you have that set up.
Post the output from M569 P0 and from M350 so we can check what settings you are actually using (just in case something in one of the homing files is changing things).
-
@gloomyandy In marlin stealth chop is either on or off. There are no additional settings there. I had it turned on. Current 1A
The Klipper has a minimum of stealth settings. And he works there the same way as for marlin.
With a Duet3Mini+ this doesn't work as expected.
The screenshots of the m350 and m569 z1 commands are below.
-
@gloomyandy today I turned off homing completely. wrote in the file homeall.g G92 X0 Y0 Z0
-
@vladimir_u Your RRF current settings seem to show that you are only running 700mA rather than the 1A used in Marlin. Is there a reason for that? Oh and RRF uses peak current not RMS (like Marlin and Klipper) so to use the same current in RRF as Marlin you need to multiply your Marlin setting by 1.414 so you might want to try increasing the motor current up to 1400 to be a closer match to your Marlin/Klipper settings.
-
@gloomyandy Yes, in my config, which I showed a few messages ago, the current is 700mA. These are already the consequences of experiments. By reducing the amperage, I hoped to reduce the noise level. at 1.4A, the steppers will get very hot, I think so.
-
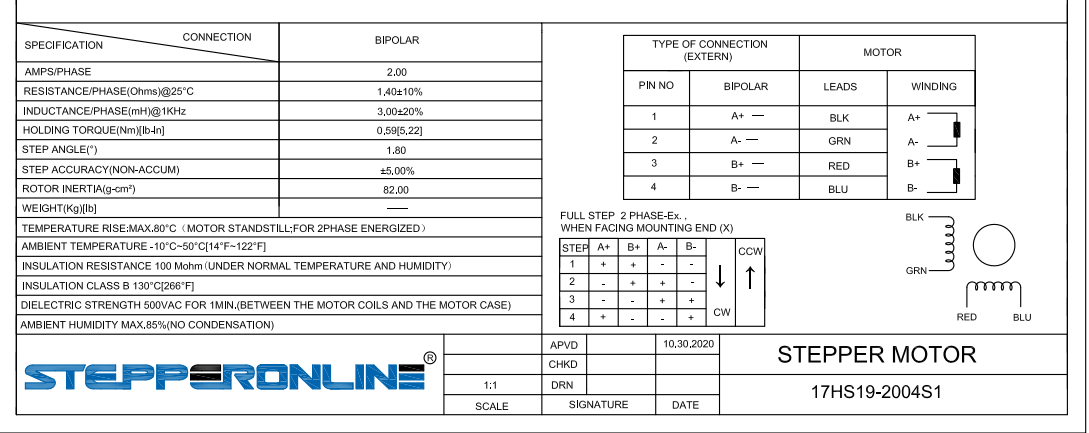
@vladimir_u please post the datasheet of the steppers.
-
@pcr This is stepperonline 17hs19-2004s1
-
@vladimir_u this one is silent at my printer
M906 X1200 Y1200
-
@pcr Yes, I have tried these settings.
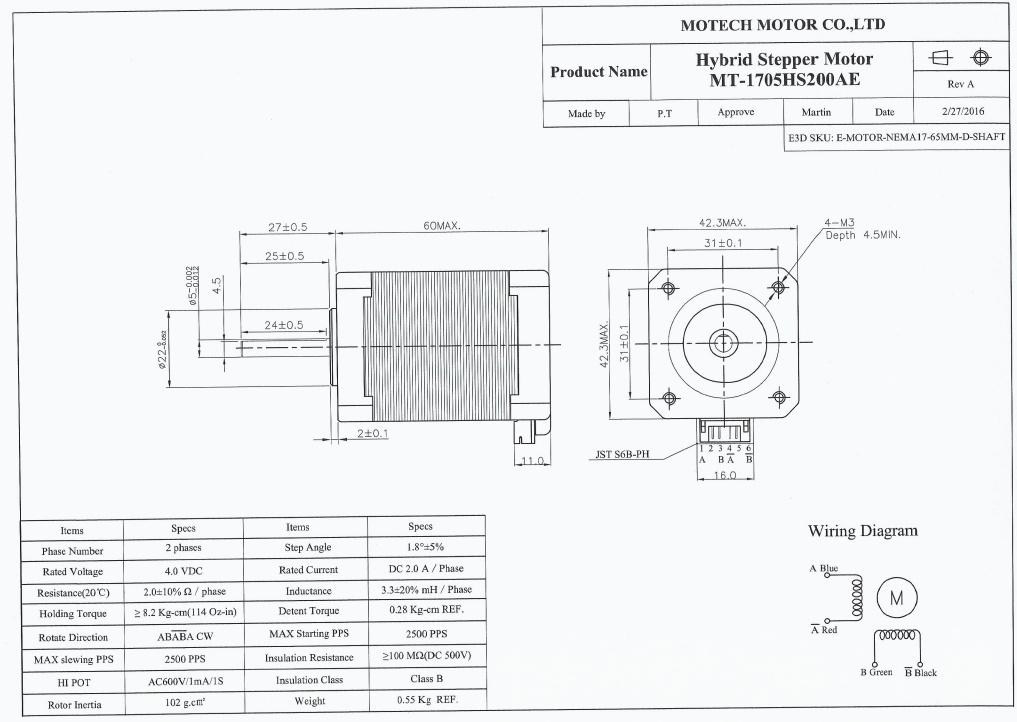
I have steppers from E3D. They are also 2A.
I will experiment with replacement. I also want to try a 24V power supply
-
the problem turned out to be the steppers themselves. they looked identical, but the noise from them was great. replacing the steppers solved my problem.