kinematics matrix in the object model
-
I'm playing with differnet kinematics, and have another thread about coupling between axes in a polar kinematics, but this is different: now I'm looking at coupling between axes in a cartesian kinematics. (Actually to help me get my head round the same question).
The matrix I get from M669 is different to the matrix that's in the object model, and I can't work out how one is derived from the other, and I'd like to understand it. The github object model documentation just says 'Forward matrix'.
This is actually on a Fly E3-Pro board, running gloomyandy's RepRapFirmware for STM32F4 based Boards 3.3.0_10, but I have the same behaviour on a MB6HC running RepRapFirmware for Duet 3 MB6HC 3.4.0beta6.
If I have
M669 K0 Y{1/9}:1.3:0
I get response to a bareM669as I expect:
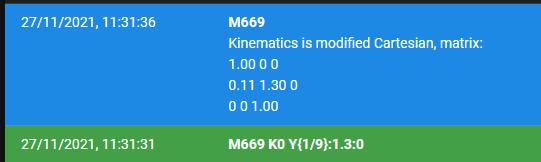
However, the object model shows a different matrix (this is the middle row):

The middle term is the reciprocal of what I specified, but the first term is I-don't-know-what.
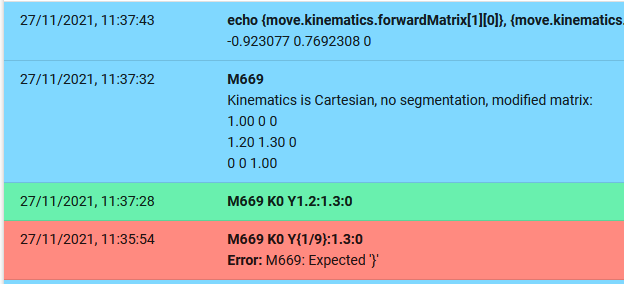
On the MB6HC if I do exactly the same I get an error (is that a beta-bug?) but if I do something similar I likewise get parameters back from the object model I don't understand:
What is the relationship between the kinematics matrix in the object model and the one set and reported by M669?
-
@achrn you have found a bug. In the OM both the forward and inverse matrices return the forward matrix. I will fix this in the next 3.4beta.